Sea $h : \mathcal{J} = (c, d) \rightarrow \mathcal{I} = (a, b)$ una función monótona $\mathbb{R} \rightarrow \mathbb{R}$ tal que:
$$h (c, d) = (a, b)$$
Sea $t \in (a, b)$ y sea $\tau \in (c, d).$
Podemos hacer la composición $$\beta : \mathcal{J} \rightarrow \mathbb{R}^n$$
$$\beta = \alpha \circ h$$
$\beta ( \tau ) = \alpha ( h (\tau))$
$t = h (\tau)$
entonces ${\beta \, }^{\prime} (\tau) = \frac{d}{d \tau} (\alpha (h(\tau)) = {\alpha}^{\prime} ( h (\tau)) h^{\prime} (\tau)$
Pueden suceder dos casos:
* $h^{\prime} (\tau ) > 0 \; \forall\, \tau \Rightarrow h $ es creciente, entonces el vector ${\beta \, }^{\prime} (\tau)$ es un mútliplo positivo de ${\alpha}^{\prime} ( h (\tau))$, es decir, apunta en la misma dirección.
* $h^{\prime} (\tau ) < 0 \; \forall\, \tau \Rightarrow h $ es decreciente, entonces el vector ${\beta \, }^{\prime} (\tau)$ es un mútliplo negativo de ${\alpha}^{\prime} ( h (\tau))$, es decir, apunta en la dirección contraria.
$\|{\beta \, }^{\prime \prime} (s) \| = \dfrac{1}{2}$
Luego $N (s) = \Bigg( – \, \cos \Bigg( \dfrac{s}{\sqrt{2}}\Bigg) ,\, – \, \sin\Bigg( \dfrac{s}{\sqrt{2}}\Bigg), 0\Bigg)$ que es horizontal y paralelo al plano $xy.$
En el siguiente enlace puedes observar la animación de este ejemplo.
Dada una curva $\alpha : \mathcal{I} \subset \mathbb{R} \rightarrow \mathbb{R}^3$ parametrizada por longitud de arco, tenemos el vector tangente $T (s) := {\alpha}’ (s).$
Si ${\alpha}^{\prime \prime} (s) \neq \vec{0}$, tenemos el vector normal $N(s) := \dfrac{{\alpha}^{\prime \prime} (s)}{\| {\alpha}^{\prime \prime} (s)\|}$
Observación: $\dfrac{d}{ds} T(s) = \dfrac{d}{ds} {\alpha}’ (s) = {\alpha}^{\prime \prime} (s) = \| {\alpha}^{\prime \prime} (s) \| N (s).$ Entonces $$T’ (s) = \mathcal{K} (s) = N (s)$$
Con $T$ y $N$ podemos producir otro vector, el vector Binormal $\vec{B} (s)$, donde $$\vec{B} (s) = T(s) \times N(s)$$
¿Cómo cambia $\beta\, (s)$?
$$\begin{align*} {\beta \, }’ (s) &= \Big( T (s) \times N (s) \Big)’ \\ &= T’ (s) \times N (s) + T (s) \times N’ (s) \\ &= \mathcal{K} \cdot N(s) \times N(s) + T (s) \times N’ (s) \\ &= \mathcal{K} + T (s) \times (aT + c B) \\ {\beta \, }’ (s) &= c (T \times B) = c N(s) \end{align*}$$
Definamos la torsion de la curva en el punto $\alpha (s)$ como el número $\tau (s)$ tal que $${B \, }’ (s) = – \, \tau (s) N (s)$$
Tres fórmulas
$$\begin{align*} T’ (s) &= \mathcal{K} (s) N(s) \\ {B \, }’ (s) &= – \, \tau (s) N(s) \\ N’ (s) &= \mathcal{K} (s) T (s) + \tau (s) B (s)\end{align*}$$
La fórmula de $N’ (s)$ se deduce a partir de $ N = B \times T $, ya que derivando esta expresión se tiene que:
El contenido de esta sección se basa predominantemente en el libro Wheeden, R.L., Zygmund, A., Measure and Integral. An Introduccion to Real Analysis. (2da ed.). New York: Marcel Dekker, 2015, págs 30-34.
Continuaremos viendo condiciones bajo las cuales sea posible afirmar la existencia de la integral $\int_{a}^{b}f \, d\alpha.$ Comencemos con la siguiente:
Proposición. Sean $f, \alpha:[a,b] \to \mathbb{R}.$ Si $\, \int_{a}^{b}\textcolor{RoyalBlue}{f} \, d\textcolor{magenta}{\alpha} \,$ existe, entonces también $\, \int_{a}^{b}\textcolor{magenta}{\alpha} \, d\textcolor{RoyalBlue}{f} \,$ existe y además
Demostración: Considera $P= \{x_0=a,…,x_n=b\}$ una partición de $[a,b] \,$ y sean $\xi_i \in [x_{i-1},x_i], \, i=1,…,n.$ Entonces se siguen las siguientes igualdades:
Observa que $\textcolor{blue}{T_P}$ es una suma de Riemann-Stieltjes para $\textcolor{blue}{\int_{a}^{b} \alpha \, df.}$ Tomando el límite cuando $|P| \to 0$ en (2) vemos que $\int_{a}^{b}f \, d\alpha$ existe si y solo si $\int_{a}^{b} \alpha \, df$ existe y que
Ya que el valor de las sumas de Riemann-Stieltjes depende de los valores $\xi_i$ elegidos, cuando la función $f$ es acotada, podemos delimitar el valor de $f(\xi_i)$ y, por tanto, acotar las sumas como muestra la siguiente:
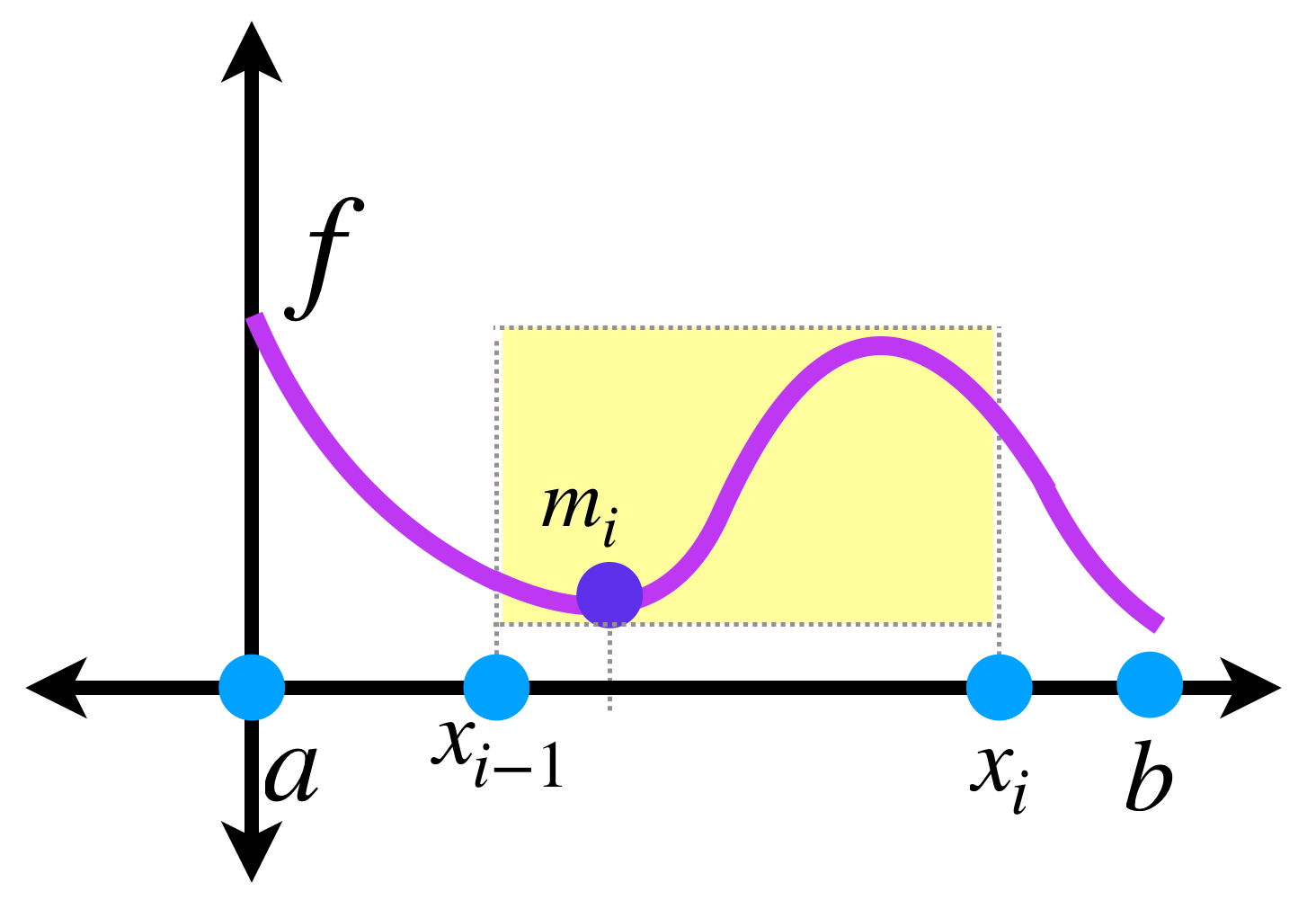
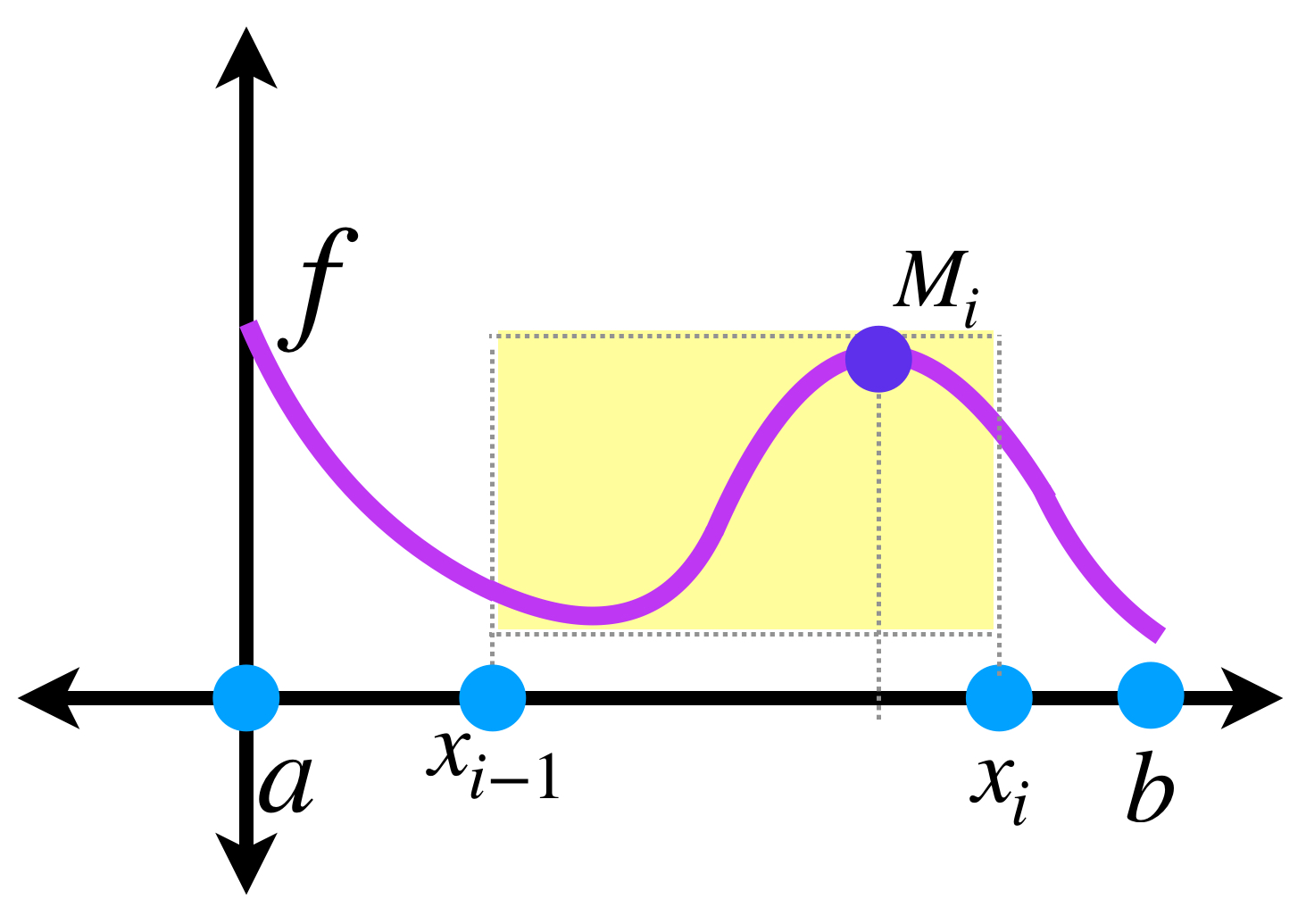
Definición. Suma inferior y suma superior de Riemann-Stieltjes. Sea $f$ acotada, $\alpha$ una función monótona creciente en $[a,b]$ y $P=\{x_0=a,…,x_n=b\}.$ Definimos los términos:
b) Si $P_1$ y $P_2$ son dos particiones, entonces $$\underline{S}_{P_1} \leq \overline{S}_{P_2},$$ es decir, cualquier suma inferior de Riemann-Stieltjes es menor igual que cualquier suma superior de Riemann-Stieltjes.
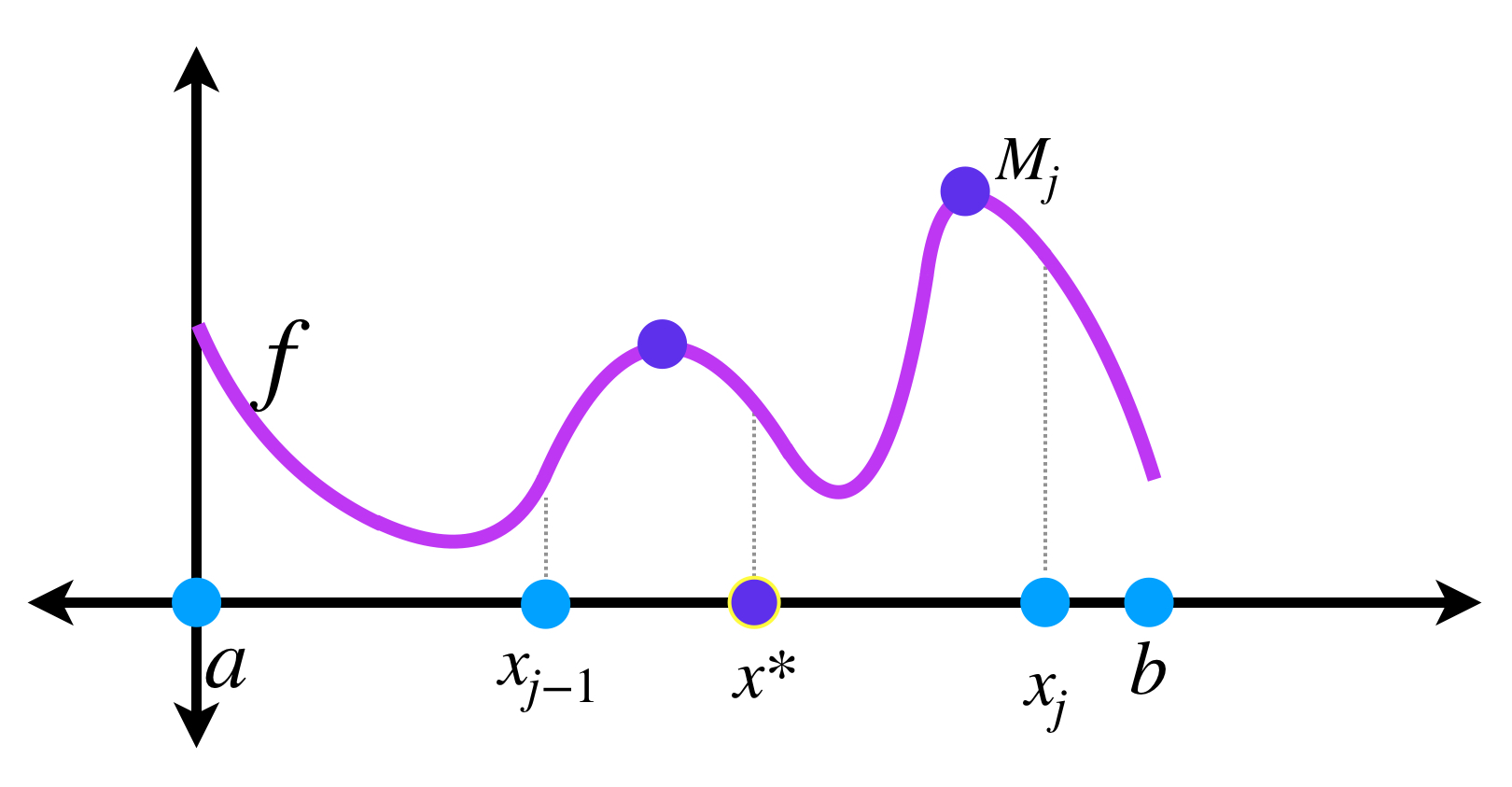
Demostración: a) Vamos a probar que $\overline{S}_Q \leq \overline{S}_P.$ El argumento para las sumas inferiores es análogo y lo dejaremos como ejercicio.
Sea $P=\{x_0=a,…,x_n=b\} \,$ y $\, P \subset Q.$ Para fines prácticos supongamos que $Q$ tiene apenas un punto más que $P.$ Sea $x^*$ ese punto. Entonces $x^* \in [x_{j-1},x_j]$ para algún $j \in \{1,…,n\}$
El siguiente enunciado muestra condiciones suficientes para la existencia de la integral de Riemann-Stieltjes.
Proposición. Sea $f:[a,b] \to \mathbb{R}$ continua y $\alpha:[a,b] \to \mathbb{R}$ de variación acotada en $[a,b],$ entonces $\int_{a}^{b} f \, d\alpha$ existe. Más aún
Demostración: Para demostrar la existencia recordemos que el teorema de Jordan visto en la entrada Funciones de variación acotada dice que $\alpha, \, $ al ser de variación acotada, puede expresarse como $\alpha = \alpha_1 \, – \, \alpha_2\, $ con $\alpha_1$ y $\alpha_2$ funciones crecientes acotadas en $[a,b].$ Si probamos que existe tanto $\int_{a}^{b}f \, d\alpha_1$ como $\int_{a}^{b}f \, d\alpha_2, \,$ entonces, por lo visto en la entrada anterior también existe la integral buscada pues
Sin pérdida de generalidad, probemos que $\int_{a}^{b}f \, d\alpha_1\, $ existe. Sea $P=\{x_1=a,…,x_n=b\}.$ De acuerdo con la proposición que acabamos de ver
A continuación vamos a demostrar que $\underset{|P| \to 0}{lim}\, \underline{S}_P \,$ y $\, \underset{|P| \to 0}{lim}\, \overline{S}_P$ existen y son iguales. La condición es evidente si $\alpha_1$ es constante así que supongamos que no lo es.
Sea $\varepsilon>0.$ Ya que $f$ es uniformemente continua en $[a,b]$ sabemos que existe $\delta>0$ tal que si $|P|< \delta,$ entonces
Por lo tanto \begin{align} \underset{|P| \to 0}{lim} \, (\overline{S}_P \, – \, \underline{S}_P) = 0. \end{align}
A continuación probaremos que existe $\underset{|P| \to 0}{lim} \, \overline{S}_P$ en $\mathbb{R}.$ Si suponemos que no existe entonces, por el criterio de Cauchy visto en la entrada anterior, existen $\varepsilon >0$ y $(P’_k)_{k \in \mathbb{N}} \,$ y $(P ^{\prime \prime} _k)_{k \in \mathbb{N}} \,$ sucesiones de particiones cuyas normas tienden a cero tales que
lo que contradice el hecho de que $\underline{S}_{P’} \leq \overline{S}_{P^{\prime \prime}}$ para cualquier $P’$ y $P^{\prime \prime}.$
Por lo tanto $\underset{|P| \to 0}{lim} \, \overline{S}_P$ existe y en consecuencia $\int_{a}^{b}f \, d \alpha_1$ existe. Análogamente, $\int_{a}^{b}f \, d \alpha_2 \,$ existe, por lo tanto $\int_{a}^{b}f \, d \alpha \,$ también existe.
se sigue de una suma de Riemann-Stieltjes similar y haciendo tender el límite a cero. La prueba de este hecho se dejará como ejercicio.
Finalizaremos esta sección con un teorema conocido, pero ahora en la versión con la integral de Riemann-Stieltjes.
Teorema. Del valor medio para la integral de Riemann-Stieltjes. Sea $f:[a,b] \to \mathbb{R}$ continua y $\alpha:[a,b] \to \mathbb{R}$ acotada y creciente. Entonces existe $\xi \in [a,b]$ tal que
Así como definimos la integral de Riemann-Stieltjes en intervalos cerrados, también podemos hacerlo en intervalos abiertos $(a,b) \in \mathbb{R}$ de esta forma: Si $[a’,b’] \subset (a,b)$ y existe $\int_{a’}^{b’}f \, d\alpha,$ haciendo $a’ \to a$ y $b’ \to b$ definimos
Hasta el momento no es muy evidente la relacion entre la existencia de la integral de Riemann-Stieltjes con los limites de las sumas inferior y superior de Riemann-Stieltjes, pese a que en Cálculo llegan incluso a considerarse equivalentes cuando coinciden. En la próxima entrada veremos bajo qué condiciones el resultado es válido en la integral que estamos estudiando.
Tarea moral
Sea $f:[a,b] \to \mathbb{R}$ acotada y $\alpha:[a,b] \to \mathbb{R}$ creciente. Sea $Q$ un refinamiento de $P \in \mathcal{P}_{[a,b]}.$ Demuestra que $$\underline{S}_P \leq \underline{S}_Q.$$
Demuestra la desigualdad pendiente $$\left|\int_{a}^{b}f \, d\alpha \right|\leq \left(\underset{x \in [a,b]}{sup}|f(x)|\right) V[\alpha;a,b] $$ donde $f$ es continua y $\alpha$ es de variación acotada.
Sean $f, \alpha:[a,b] \to \mathbb{R}.$ Prueba que se cumplen: a) Si $\int_{a}^{b}f \, d\alpha$ existe y $\alpha$ no es constante en ningún subintervalo de $[a,b]$ muestra que $f$ es acotada en $[a,b].$ b) Si $\int_{a}^{b}f \, d\alpha$ existe y $\alpha$ es creciente, muestra que para cada $P \in \mathcal{P}_{[a,b]}$ tenemos $\underline{S}_P \leq \int_{a}^{b}f \, d\alpha \leq \overline{S}_P.$
Bibliografía
Wheeden, R.L., Zygmund, A., Measure and Integral. An Introduccion to Real Analysis. (2da ed.). New York: Marcel Dekker, 2015. Págs: 30-34.
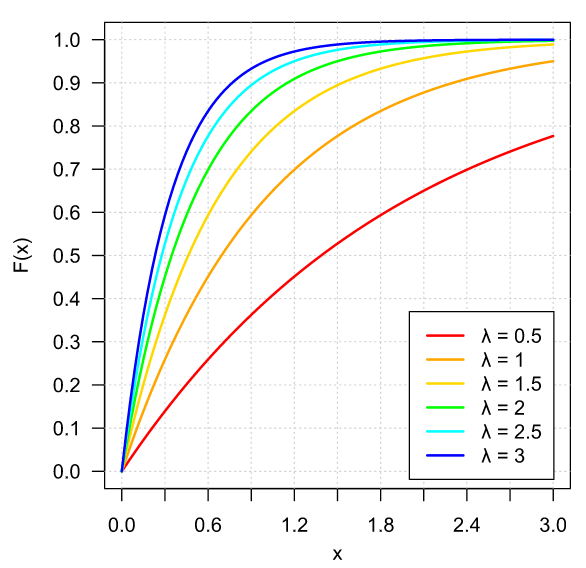
Dada $\mathcal{X}$ una variable aleatoria, se conoce como función de distribución de $\mathcal{X}$ a la función $F_{\mathcal{X}}: \mathbb{R} \to \mathbb{R} \,$ definida como: $$F_{\mathcal{X}}(x) := \mathbb{P}(\mathcal{X} \leq x)$$ es decir, la probabilidad de que la variable aleatoria tome valores menores o iguales que $x.$ Satisface lo siguiente:
Para todo $ \, x \in \mathbb{R}, \, 0 \leq F_{\mathcal{X}}(x) \leq 1$
Es continua por la derecha y tiene límite por la izquierda.
Es no decreciente, es decir, si $x_1 \leq x_2$ entonces $F_{\mathcal{X}}(x_1) \leq F_{\mathcal{X}}(x_2).$
Donde $f(t)$ es la probabilidad de que $\mathcal{X}$ tome el valor $t$, la cual es distinta de cero solamente para un conjunto a lo más numerable de valores $t.$
Podríamos preguntarnos si es posible definir una integral que muestre el valor de la función, sin importar el tipo de variable aleatoria.
En los cursos de cálculo se habla del concepto de integral de Riemann de una función $f:[a,b] \to \mathbb{R}, \, a,b \in \mathbb{R}.$ A partir de una partición $P= \{x_0= a,…, x_n = b\}$ se define la suma de Riemann como $$S(P,f) := \sum_{i =1}^{n} f(\xi_i)(x_i \, – \, x_{i-1})$$ donde $\xi_i \in [x_{i-1}, x_i] \,$ y $$\, S(P,f) \to \int_{a}^{b}f(x) \, dx \,$$ cuando $\, n \to \infty.$
La integral de Riemann-Stieltjes generaliza esta idea, modificando los intervalos generados por la partición a través de una función $\alpha:[a,b] \to \mathbb{R}.$
Definición. Suma de Riemann-Stieltjes. Sean $f:[a,b] \to \mathbb{R}, \,$ $\alpha:[a,b] \to \mathbb{R} \,$ funciones y $P= \{x_0=a,…,x_n=b\}$ una partición de $[a,b].$ Definimos la suma de Riemann-Stieltjes de $P$ con respecto a $f$ y $\alpha$ como
Idea intuitiva de la integral de Riemann-Stieltjes. Sean $f, \, \alpha$ y $P\, $ como en la definición anterior. Si existe el límite en $S(P,f, \alpha)$ cuando $n \to \infty,$ pensamos en la integral de Riemann-Stieltjes como
Para visualizar las ideas, consideremos los siguientes:
Ejemplos
En cualquier caso, $\alpha:[a,b] \to \mathbb{R}.$
$\alpha(x) = x.$ En este caso coincide con la integral de Riemann. Evidentemente: \begin{align*} \int_{a}^{b}f(x) \, d \alpha := \underset{n \to \infty}{lim} \, \sum_{i =1}^{n} f(\xi_i)(\alpha(x_i) \, – \, \alpha(x_{i-1})) = \underset{n \to \infty}{lim} \, \sum_{i =1}^{n} f(\xi_i)(x_i \, – \, x_{i-1}). \end{align*}
Si $\alpha(x) = F_{\mathcal{X}}(x)$ es la función de distribución de $\mathcal{X},$ entonces la integral de Riemman-Stieltjes es la esperanza de la variable aleatoria $Y=f(\mathcal{X}).$
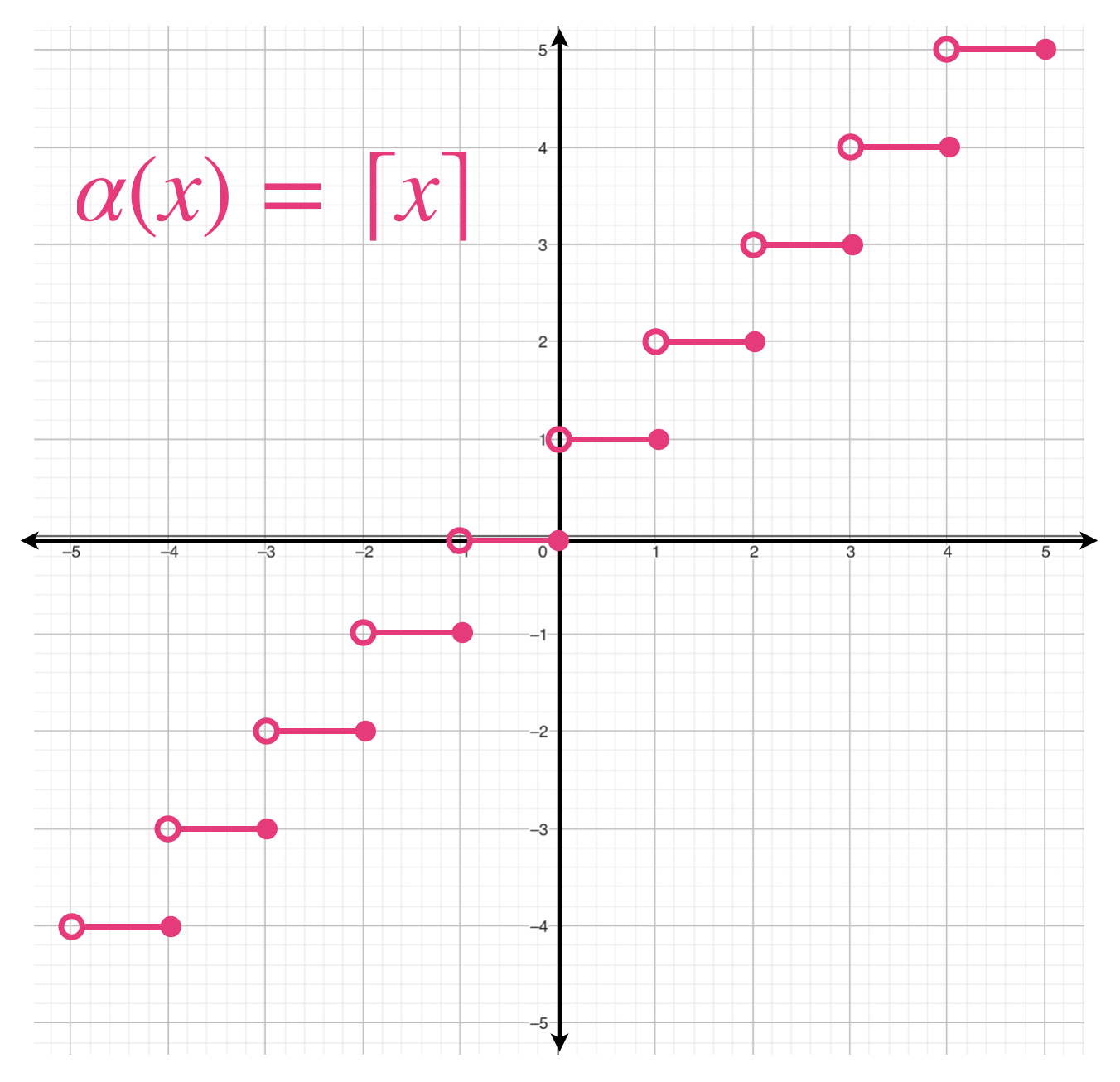
$\alpha(x) = \lceil x \rceil.$ La función techo, es decir: \begin{align*} \lceil x \rceil = {min \,} \{k \in \mathbb{Z} \, | \, k \geq x\} \end{align*}
Gráfica de $\alpha(x) = \lceil x \rceil.$
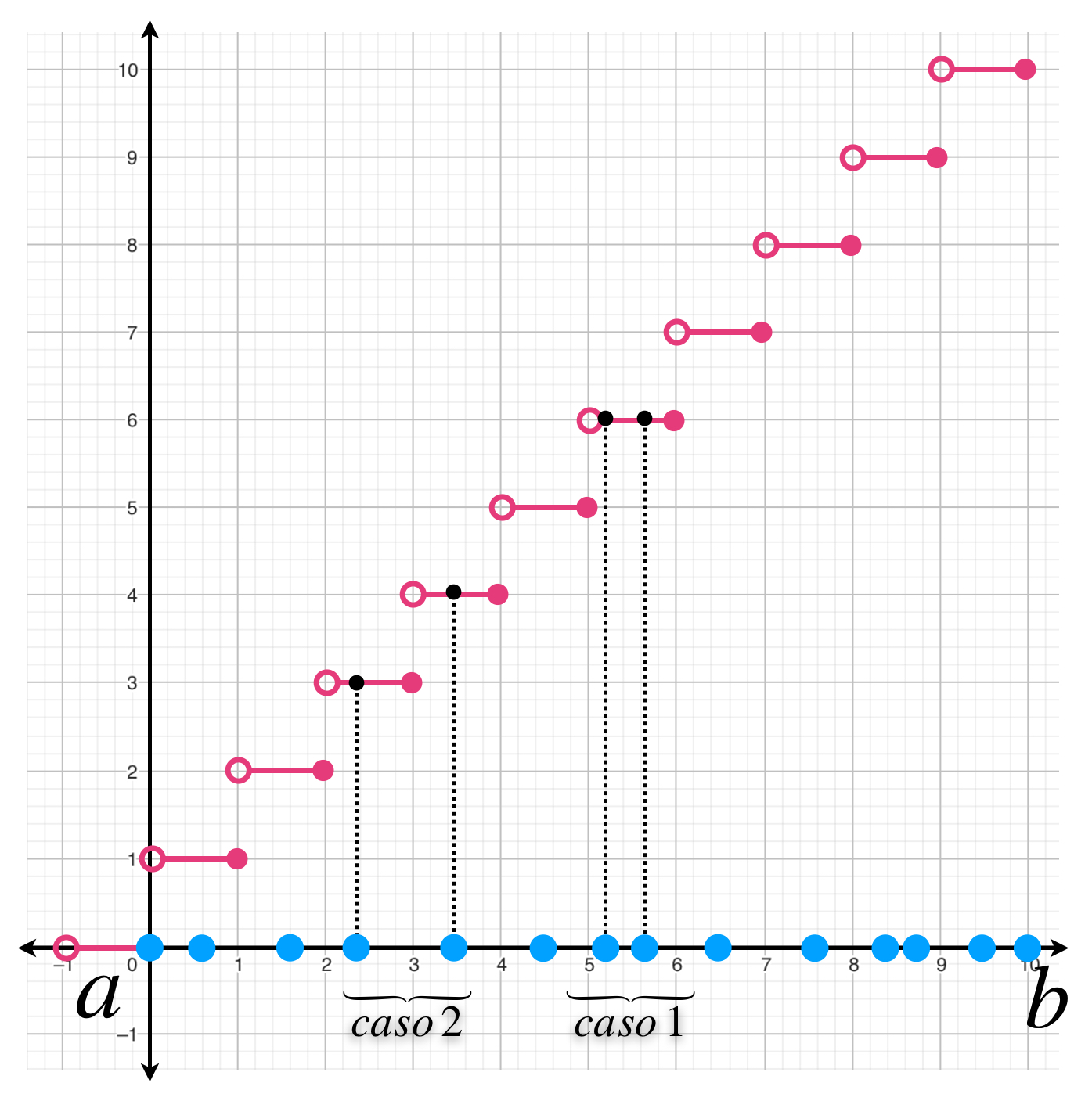
Analicemos más esta última función. Sea $P= \{x_0 = a,…,x_n =b\}.$ Entonces para cada $i=0,…,n$
Si suponemos que los intervalos son muy pequeños, podemos pedir que $|P|<1.$ En esta situación dos puntos consecutivos de la partición podrían estar entre dos enteros consecutivos o bien, tener un entero entre ellos. Así tenemos dos casos:
En consecuencia, si $\xi_i \in [x_{i-1}, x_i]$ entonces cada sumando toma los siguientes valores:
En el caso 1. $f(\xi_i)(\lceil x_i \rceil \, – \, \lceil x_{i-1} \rceil) = 0.$ En el caso 2. $f(\xi_i)(\lceil x_i \rceil \, – \, \lceil x_{i-1} \rceil) = f(\xi_1).$
La siguiente imagen permite visualizar este comportamiento.
Ejemplo de partición en el intervalo $[0,10].$
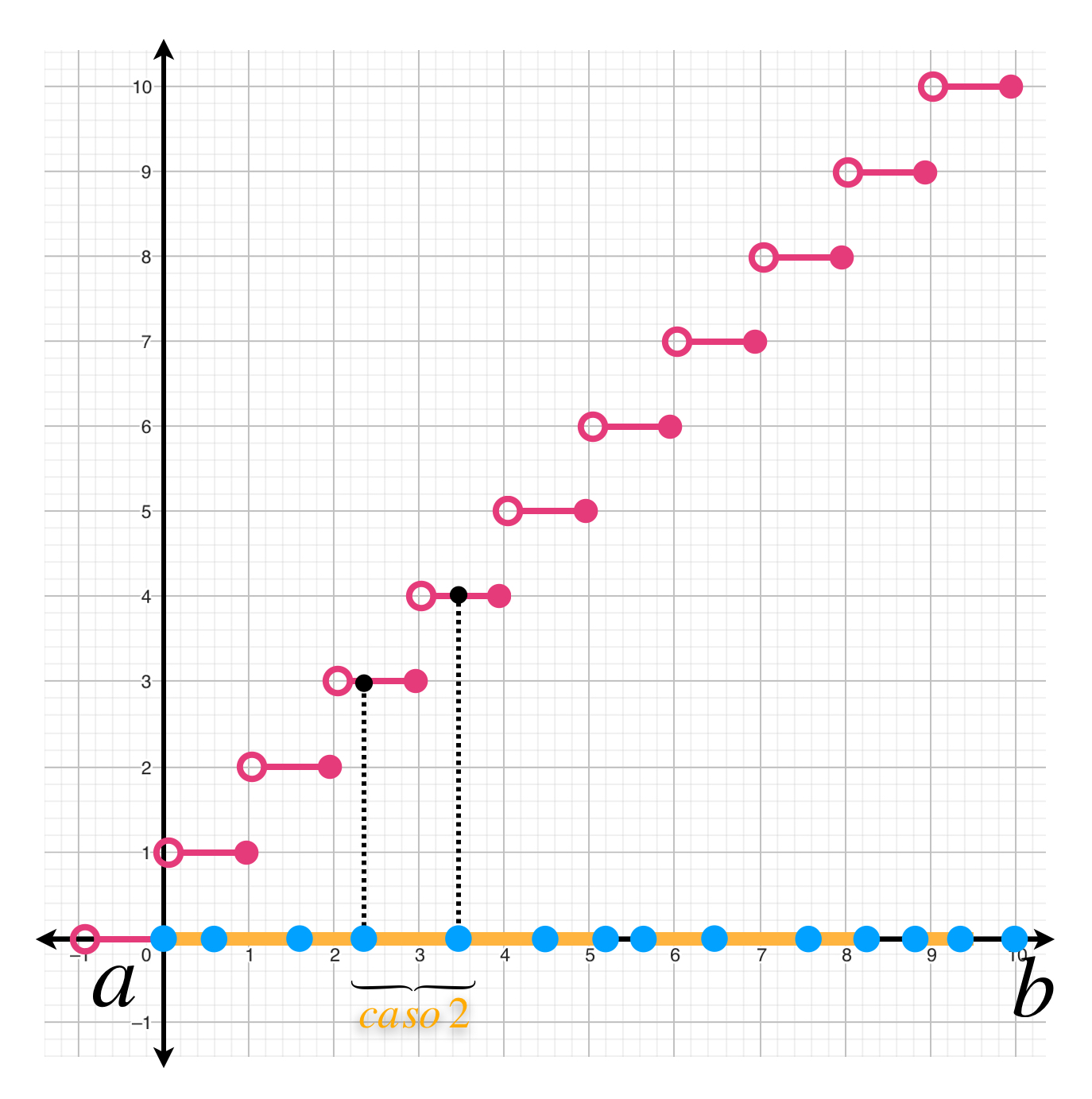
Calculemos $\int_{0}^{10}1 \, d \, \lceil x \rceil.$
En esta situación, los únicos sumandos significativos serán los que tienen algún entero en $\{1,2,…,10\}.$ Por lo tanto
$\int_{0}^{10}1 \, d \, \lceil x \rceil = \sum_{i=1}^{10} 1 = 10.$
¿Puedes calcular $\int_{0}^{10}f(x) \, d \, \lceil x \rceil,$ para cualquier $f$ continua en $[0,10]?$ Generaliza aún más y calcula $\int_{a}^{b}f(x) \, d \, \lceil x \rceil$ para cualquier intervalo $[a,b].$ $\textcolor{orange}{(\text{Ejercicio como tarea moral).}}$
Hay exactamente $10$ intervalos en una partición con $|P|<1$ donde el sumando no se anula.
En las siguientes entradas veremos que se satisface:
Proposición: Si $f$ es continua en $[a,b]$ y $\alpha$ es monótona, existe $\int_{a}^{b} f(x) \, d \alpha.$
Con la integral de Riemann-Stieltjes es posible identificar las funciones de distribución de variables aleatorias, sin importar si la variable es discreta, continua o una «mezcla» de ambas.
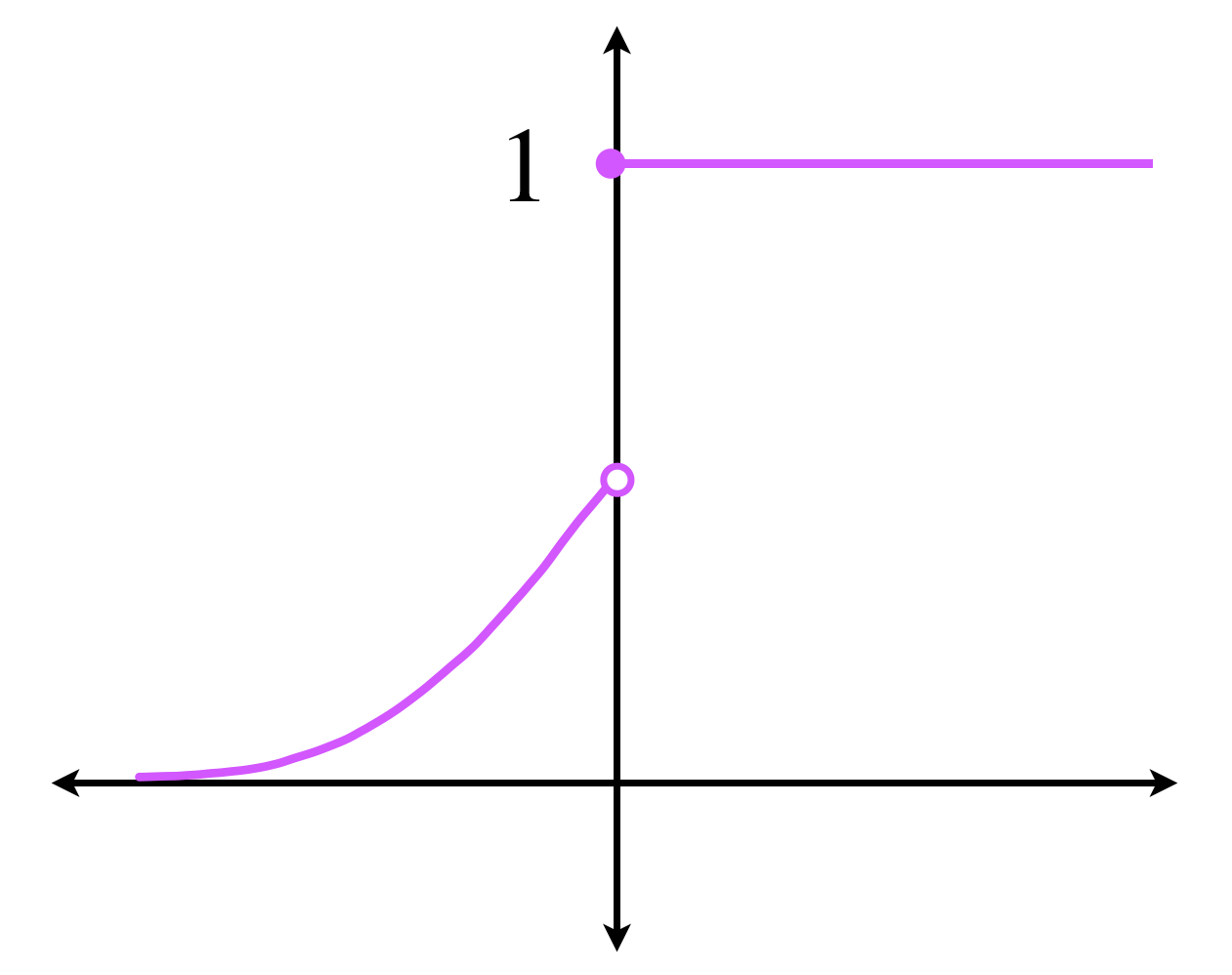
Gráfica de $\alpha.$
Ejemplo
La siguiente expresión refleja el comportamiento de una variable aleatoria que es continua en un «pedazo» y discreta en el resto. \begin{equation*} \alpha(x) = \begin{cases} \frac{1}{\sqrt{2 \pi}}\int_{-\infty}^{x} e ^{-\frac{t^2}{2}} dt \, &\text{ si $x<0$ }\\ \\ 1 \, &\text{ si $x \geq 0$} \end{cases} \end{equation*}
Entonces, si $F_{\mathcal{X}}$ es la función distribución de la variable aleatoria descrita se satisface:
$F_{\mathcal{X}}(b) \, – \, F_{\mathcal{X}}(a) = \text{Probabilidad de que } \mathcal{X} \text{ tome valores en } [a,b] = \int_{a}^{b}1 \, d \alpha.$
La esperanza de una variable aleatoria puede expresarse con una integral de Riemann-Stieltjes
A continuación presentamos una definición de la esperanza con la integral que estamos conociendo y es equivalente a la usada convencionalmente. Para profundizar en la teoría, visitar Probabilidad I: Valor Esperado de una Variable Aleatoria
Definición.Esperanza de $\mathcal{X}.$ Sea $\mathcal{X}$ una variable aleatoria con función de distribución $\alpha(x).$ La esperanza de $\mathcal{X}$ es $$E(\mathcal{X}) = \int_{-\infty}^{\infty}x \, d\alpha.$$
Ejemplos
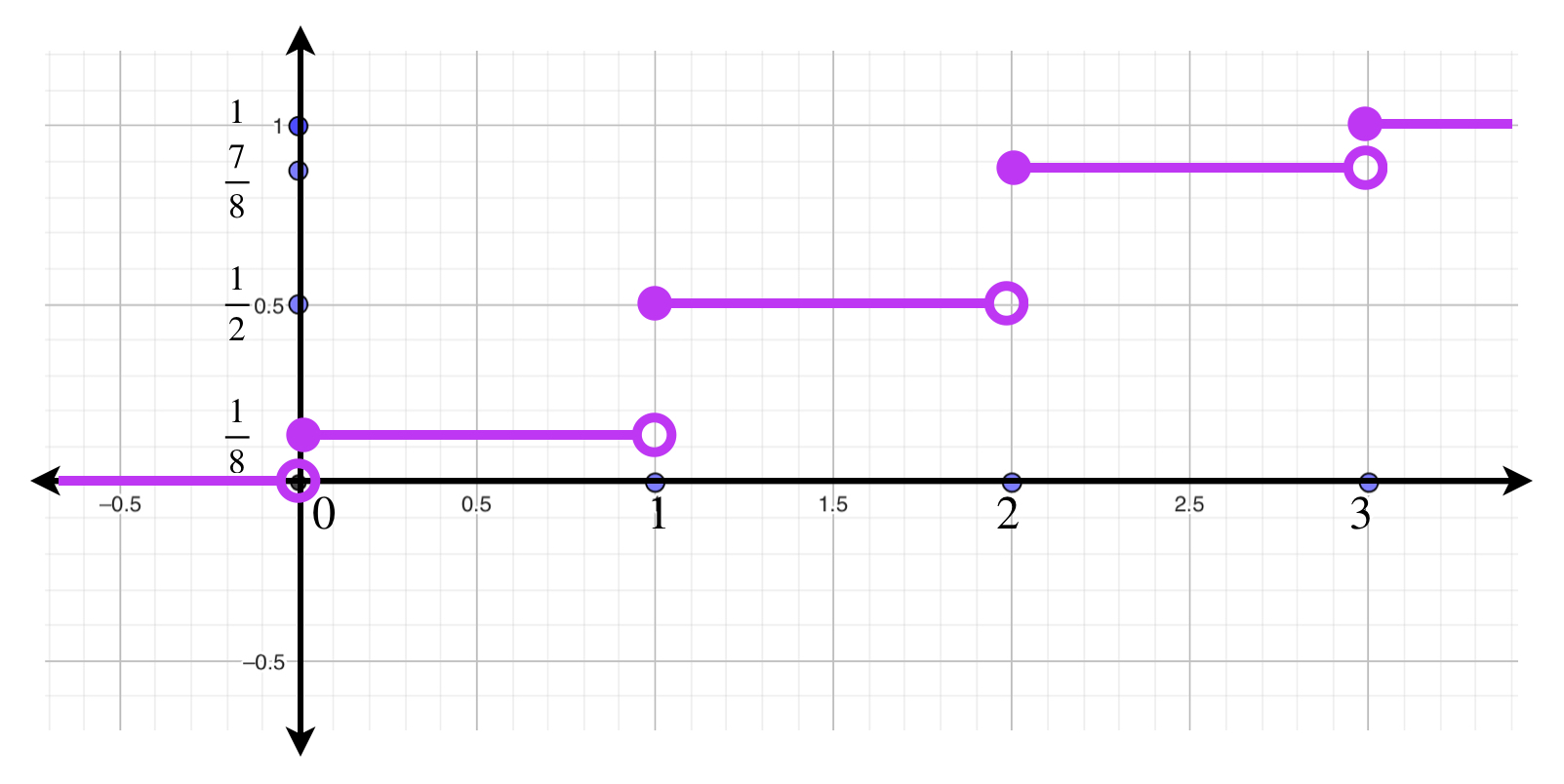
Sea $\mathcal{X}$ variable aleatoria con distribución binomial, $n=3, \, p= \frac{1}{2}.$ Dado que
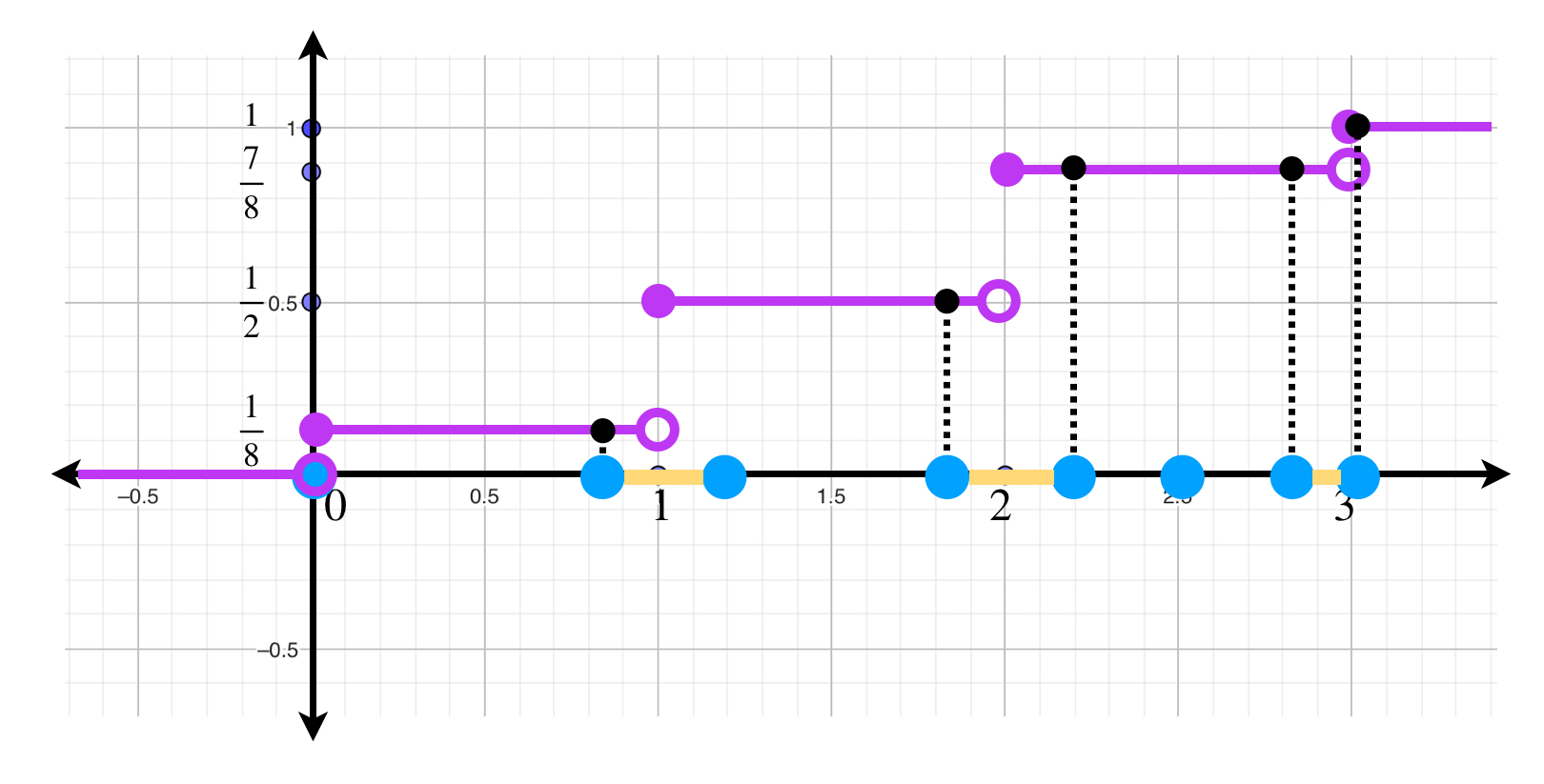
Como sugerencia, verifica que en una partición de $[0,3]$ con intervalos muy pequeños $(\delta< 1)$ los únicos sumandos que no se anulan en la suma de Riemann-Stieltjes serán los correspondientes a intervalos que tienen algún entero en $\{0,1,2,3\}.$
Otro ejemplo para terminar esta sección
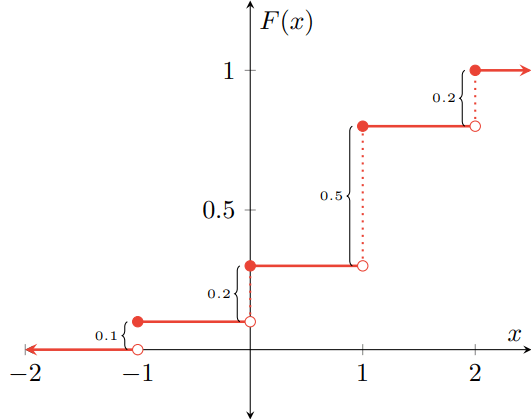
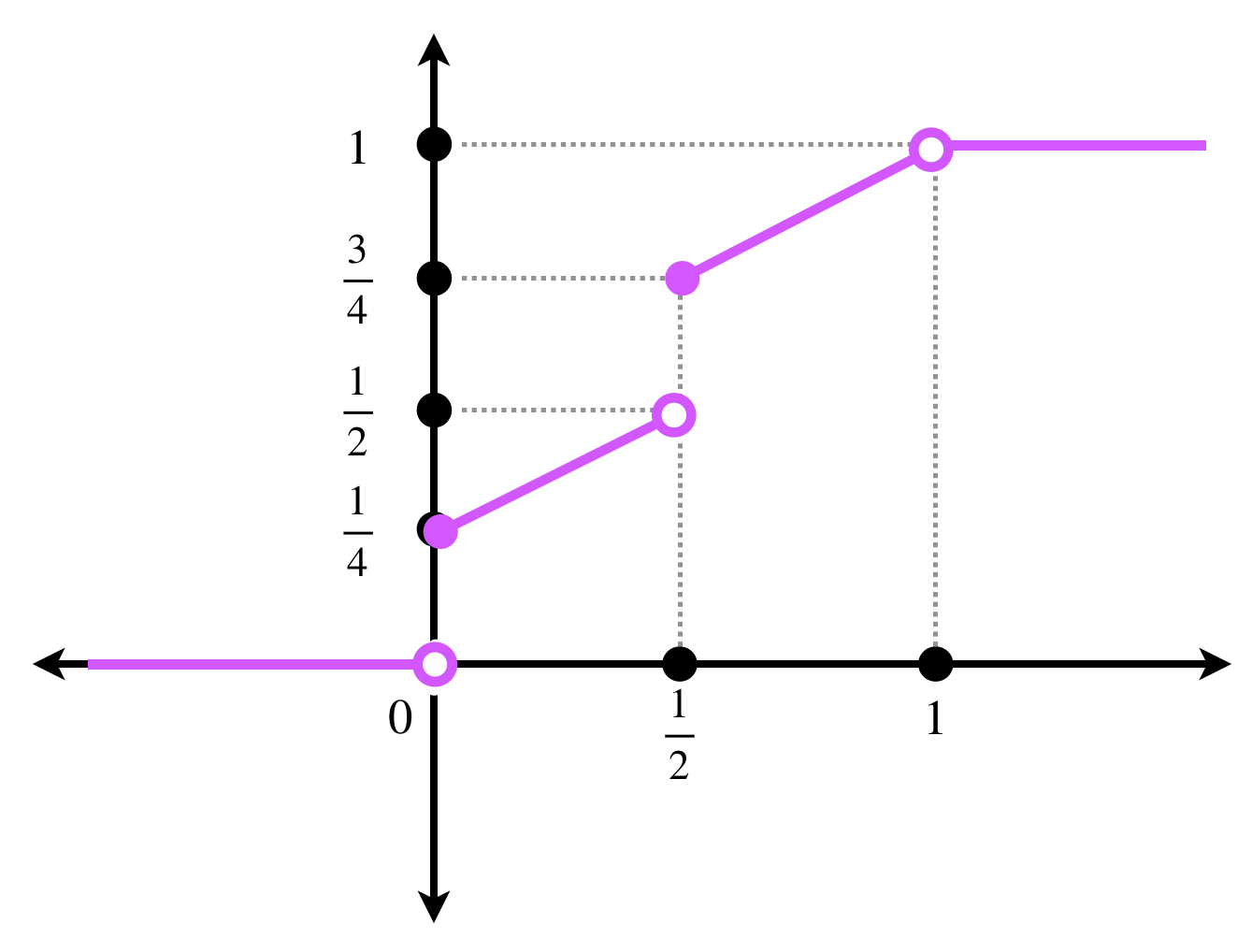
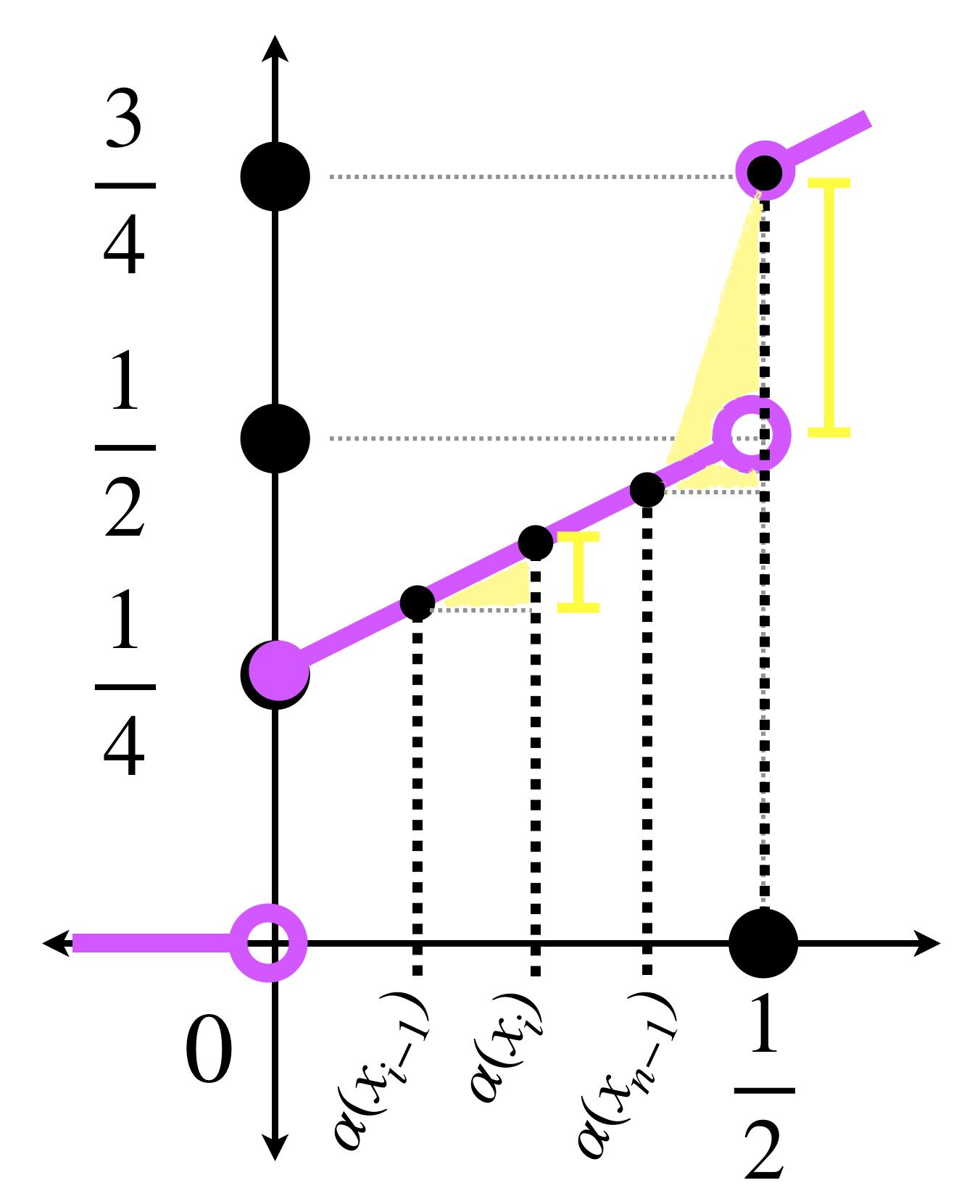
Ahora supongamos que la función de distribución de una variable aleatoria está dada por:
Observa que todos los intervalos a excepción del último cumplen que \begin{align*} \alpha(x_i) \, – \, \alpha(x_{i-1}) &= \left(\frac{x_i}{2}+\frac{1}{4}\right) \, – \, \left(\frac{x_{i-1}}{2}+\frac{1}{4}\right)\\ &= \frac{x_i \, – \, x_{i-1}}{2} \end{align*}
Representación de una partición en $[0, \frac{1}{2}].$
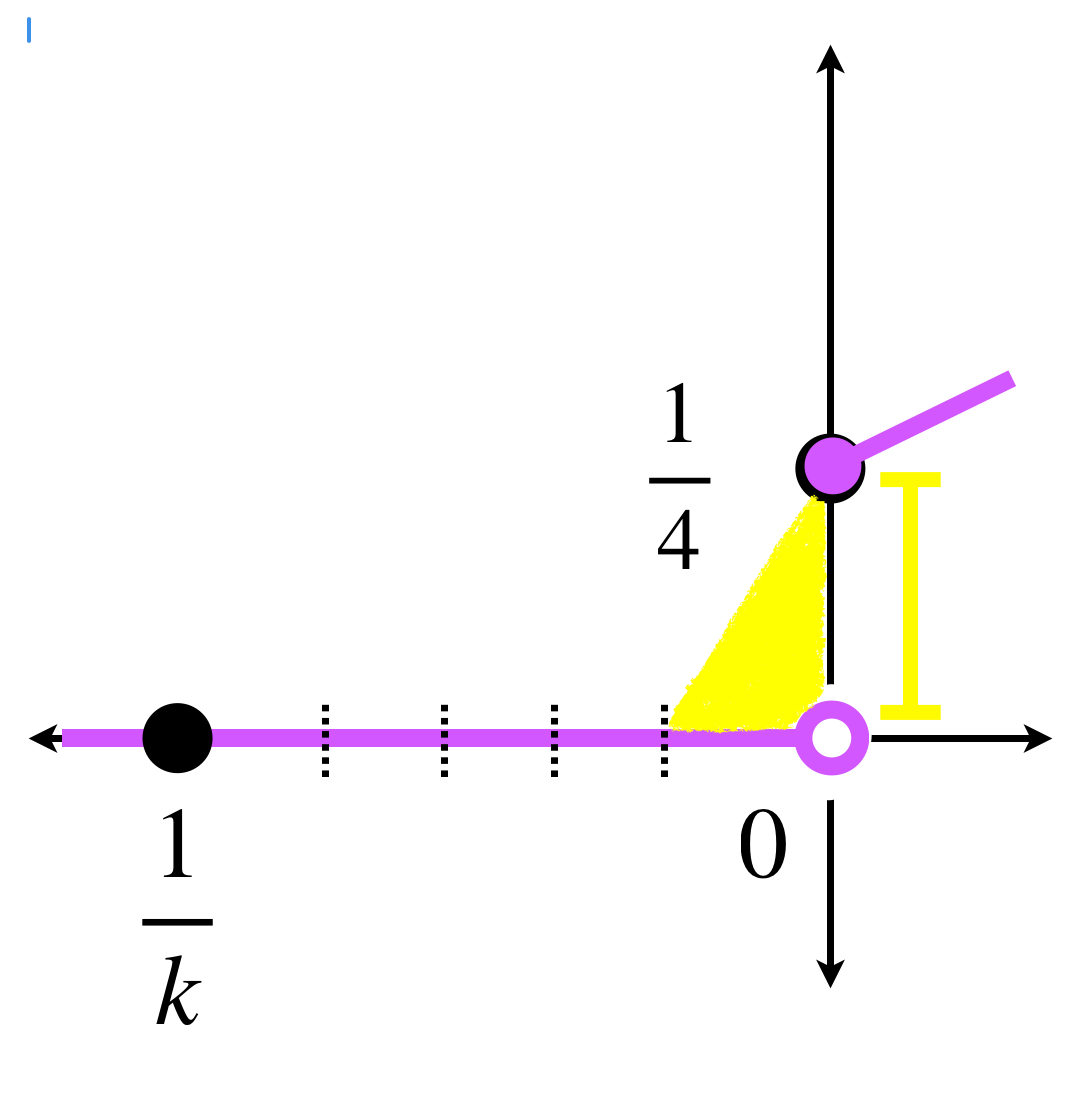
Evidentemente, la primera parte $\int_{-\infty}^{-\frac{1}{k}}x \, d\alpha \,$ se anula. La otra integral $\int_{-\frac{1}{k}}^{0}x \, d\alpha \,$ se puede calcular con sumas de Riemann-Stieltjes: Si $P=\{x_0= \frac{1}{k},…,x_n=0\}$ es una partición de $[\frac{1}{k},0]$ el único sumando significativo es el último donde $f(\xi_n)(\alpha(x_{0}) \, – \, \alpha(x_{n-1})) \, \to \, 0(\frac{1}{4} \, – \, 0)=0.$
Representación de una partición en $[\frac{1}{k},0].$
Una vez analizado los temas de Razón Cruzada e Involución, es hora de realizar unos ejercicios que se dejaran a continuación, todo con el objetivo de practicar y fortalecer el tema visto.
Ejercicios
1.- Sean $A$, $B$ y $C$ tres puntos distintos en una recta, analice las razones cruzadas $\{ABCB\}$, $\{ABCA\}$ y $\{ABCC\}$.
2.- Demuestre el Teorema de Desargües, referente a triángulos en perspectiva en propiedades de razón cruzada.
3.- Sean $A$, $B$ y $C$ tres puntos colineales, encuentre $D$ talque $\{BACD\}=\{ABCD\}$.
4.- Muestre que la razón cruzada de cuatro puntos en una recta, es igual a la razón cruzada de sus polares con respecto a cualquier circunferencia.
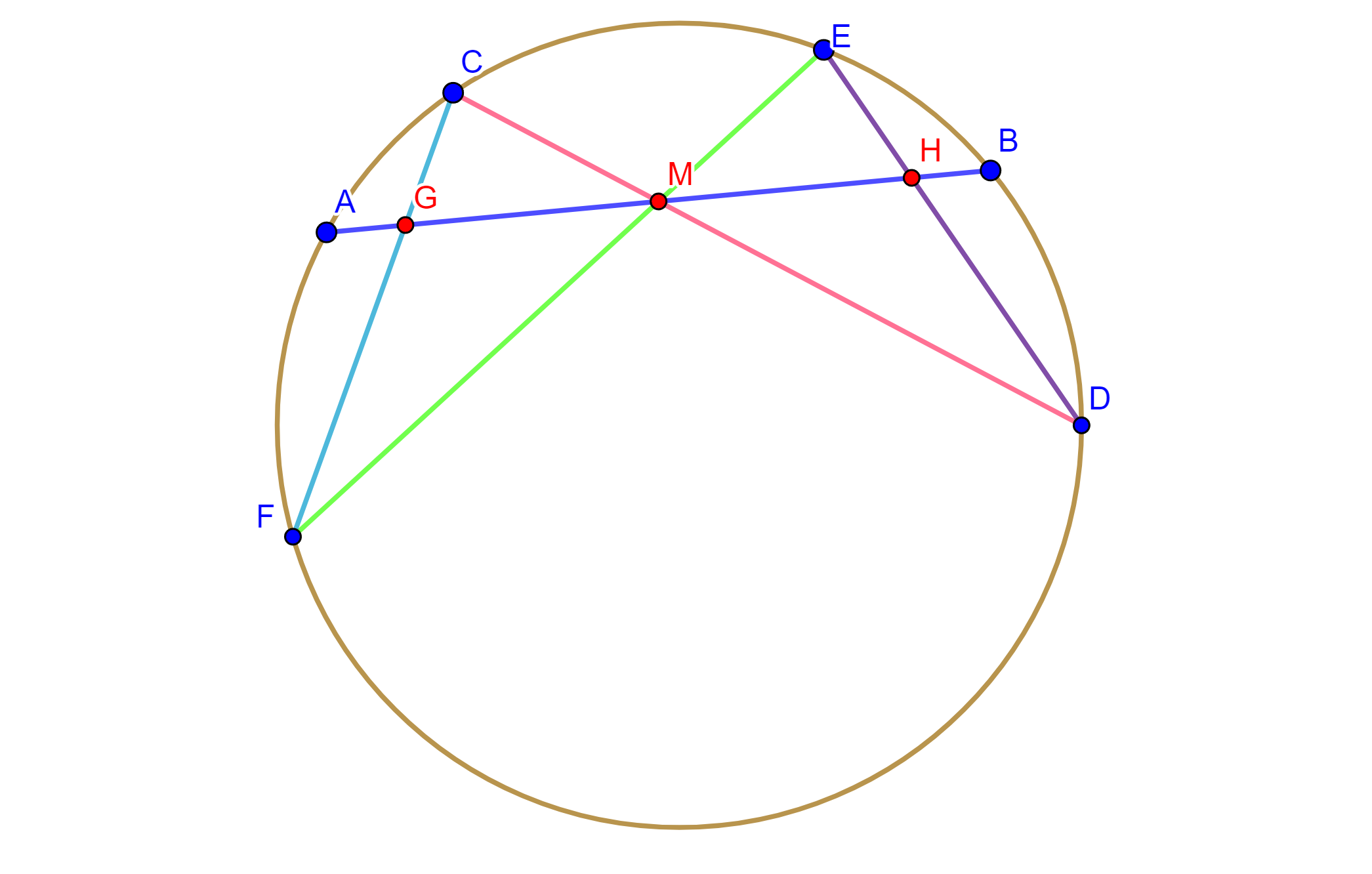
5.- Demuestre el Teorema de la Mariposa. Si se trazan dos cuerdas $EF$ y $CD$, por el punto medio $M$ de una cuerda, $AB$ de una circunferencia, y si $DE$ y $CF$ intersecan a $AB$ en $G$ y $H$ respectivamente, entonces $M$ es el punto medio de $GH$.
6.- Sean seis puntos colineales con un punto $O$ en una recta se corresponden en pares $A,A’,B,B’,C,C’$, y si $OA \bullet OA’ = OB \bullet OB’ =OC \bullet OC’ $, demuestra que $\{AA’BC\}= \{A’AB’C\}$.
7.- Demuestre que el conjugado del centro de una involución de puntos es el punto ideal de la base.
8.- Sean seis pares de puntos en involución $A,A’,B,B’,C$ y $C’$, y si $D$ y $D’$ son dos puntos en la recta tal que $\{A’B’C’D’\}=\{ABCD\}$, entonces $D$ y $D’$ también son un par conjugado de la involución.
9.- Sea un punto $X$ cualquiera fuera de una circunferencia, si se trazan tres rectas que la corten en los pares de puntos $A,A’,B,B’,C,C’$ respectivamente y si unimos estos puntos a cualquier otro punto de la circunferencia, por demostrar que el haz así obtenido está en involución.
10.- Demostrar el Teorema. Dado un cuadrángulo completo, sus tres pares de lados opuestos son intersecados por cualquier transversal que no pasa por un vértice en tres pares de puntos conjugados de una involución.
Más adelante…
La siguiente unidad abarca varios temas interesantes.