5.2. Órbitas: iteración y tipos de órbita
Definición de un sistema dinámico discreto
Cuando estudiamos sistemas dinámicos discretos, estamos interesados en cómo cambia el sistema con el paso del tiempo. Un sistema dinámico discreto es aquel cuya evolución se describe por medio de ecuaciones matemáticas que se actualizan en intervalos de tiempo específicos. Estos sistemas se «avanzan» en pasos discretos (por ejemplo, de un día a otro, de un año a otro, de una generación a otra).
Como menciona Torres Olin “Un sistema dinámico es un organismo cambiante, o propenso al cambio. Es un conjunto de elementos que describen la evolución de un sistema. […] Se define un sistema dinámico discreto cuando medimos el tiempo en forma tal que cualesquiera dos puntos en el tiempo $t_1$ y $t_2$ están bien separados, es decir, el tiempo se mide respecto a un conjunto discreto.” (Torres Olin, 2019)
Introducción a las órbitas en sistemas dinámicos discretos
En el contexto de los sistemas dinámicos discretos, las órbitas se refieren a las trayectorias que siguen las soluciones de un sistema de ecuaciones a lo largo del tiempo, cuando el tiempo avanza en pasos discretos.
• Definición. Las órbitas son secuencias de puntos que representan el estado del sistema en diferentes momentos del tiempo. Cada uno de estos puntos se encuentra en el espacio de fases del sistema, que es el conjunto de todos los posibles estados del sistema en el que se puede encontrar.
Por ejemplo, si estamos estudiando la población de una especie en un ecosistema, cada punto de la órbita representará el número de individuos de esa población en un momento dado. A medida que el tiempo avanza, la población cambia, y por lo tanto, la órbita describe cómo esa población evoluciona con el tiempo.
• Relación con las ecuaciones recursivas. En un sistema dinámico discreto, la evolución del sistema se describe mediante ecuaciones recursivas. Esto significa que el valor del estado del sistema en el tiempo t + 1 depende del valor en el tiempo t. Así, en cada iteración, el sistema actualiza el valor de la población y lo usa para calcular el valor en el siguiente paso.
Un ejemplo sería un modelo de población descrito por la ecuación:
$P_{t+1} = r \cdot P_t \cdot (1 – \frac{P_t}{K})$,
donde $P_t$ es la población en el tiempo t, r es la tasa de crecimiento de la población y K es la capacidad de carga del ambiente, es decir, el número máximo de individuos que el ecosistema puede soportar.
• Importancia de las órbitas. Las órbitas permiten entender el comportamiento a largo plazo del sistema. A medida que el sistema evoluciona con el tiempo, las órbitas nos ayudan a identificar patrones. Según el tipo de órbita, el sistema puede estabilizarse en un valor constante, entrar en un ciclo periódico o volverse impredecible (lo que se conoce como caos).
¿Qué es la iteración en sistemas dinámicos discretos?
La iteración es el proceso mediante el cual repetimos una operación matemática para obtener el siguiente valor del sistema a partir del valor actual. En otras palabras, es aplicar repetidamente una función o ecuación para predecir el comportamiento futuro del sistema. Se trata de calcular el estado del sistema en el siguiente paso de tiempo, usando el valor actual como punto de partida. Cada «paso» o «iteración» produce un nuevo valor que se usa como base para la siguiente, es decir, cada vez que realizamos una iteración, tomamos el valor del sistema en el tiempo t y lo usamos para calcular el valor en el tiempo t + 1, y este valor calculado luego se convierte en el valor inicial para el siguiente paso
Ejemplo
Consideremos un modelo de crecimiento poblacional donde la población en el tiempo t + 1 depende de la población en el tiempo t:
$P_{t+1} = r \cdot P_t \cdot (1 – \frac{P_t}{K})$
Supongamos una población inicial $P_0 = 50$, una tasa de crecimiento r = 1.5 y una capacidad de carga K = 100, podemos calcular las poblaciones de los siguientes tiempos de forma iterativa:
• Para t = 0, $P_0 = 50$.
• Para t = 1, $P_1 = 1.5 \cdot 50 \cdot (1 – \frac{50}{100}) = 1.5 \cdot 50 \cdot 0.5 = 37.5$.
• Para t = 2, $P_2 = 1.5 \cdot 37.5 \cdot (1 – \frac{37.5}{100})$, y así sucesivamente.
Este proceso continúa para muchos pasos, y la población va cambiando a medida que se realizan las iteraciones.
Tipos de órbitas
Las órbitas en los sistemas dinámicos pueden clasificarse en diferentes tipos, dependiendo de cómo se comporta el sistema con el paso del tiempo.
1. Órbitas periódicas: son aquellas en las que el sistema regresa al mismo estado después de un número finito de pasos, es decir, la secuencia de valores se repite cíclicamente.
Ejemplo: Si r = 2 y $P_0 = 50$, el sistema puede entrar en una órbita periódica. En este caso, la población podría oscilar entre los valores 60 y 50 en un patrón cíclico, como P = 60, 50, 60, 50,….
Estas órbitas son estables y predecibles, ya que la población sigue un patrón constante que se repite con el tiempo.
2. Órbitas atractoras: son aquellas en las que el sistema tiende a estabilizarse en un valor constante o en un ciclo periódico a medida que pasa el tiempo. Estas órbitas son estables, y las pequeñas perturbaciones tienden a ser corregidas.
Ejemplo: En el modelo logístico de crecimiento poblacional, si los valores de r y K se eligen adecuadamente, la población puede estabilizarse en el valor P = K, que es la capacidad de carga del ambiente. Este valor se convierte en una órbita atractora, ya que la población tiende a estabilizarse alrededor de K con el paso del tiempo.
3. Órbitas caóticas: son aquellas en las que el comportamiento del sistema es extremadamente sensible a las condiciones iniciales. Pequeñas variaciones en el valor inicial del sistema pueden provocar trayectorias completamente diferentes. Estos sistemas son impredecibles y no siguen un patrón repetitivo.
Ejemplo: Si r es demasiado grande (por ejemplo, r = 3.5), el sistema puede volverse caótico, donde las iteraciones no siguen un patrón predecible, sino que se distribuyen de forma irregular.
Ejemplo
Uno de los ejemplos más comunes de sistemas dinámicos discretos en biología es el modelo logístico de crecimiento poblacional, especialmente cuando se estudian especies invasoras o la competencia entre especies.
Tomemos el modelo logístico como ejemplo para ilustrar cómo las órbitas se aplican al crecimiento de una población.
El modelo logístico es:
$P_{t+1} = r \cdot P_t \cdot \left(1 – \frac{P_t}{K}\right)$.
Dependiendo de los parámetros r (tasa de crecimiento) y K (capacidad de carga), el comportamiento de la población puede cambiar:
• Para valores bajos de r, la población puede estabilizarse en un valor constante, formando una órbita atractora.
• Para valores intermedios de r, puede haber un comportamiento periódico.
• Para valores altos de r, el modelo puede entrar en caos.
Análisis de cómo pequeñas variaciones en las condiciones iniciales pueden cambiar el comportamiento de la población
En un modelo caótico, por ejemplo, si una especie invasora comienza con una población de $P_0 = 50$, y otra con $P_0 = 50.1$, con un parámetro r = 3.5, las trayectorias pueden divergir rápidamente, lo que hace que sea muy difícil predecir el futuro de las poblaciones.
Ejercicio
Resuelve el siguiente modelo de crecimiento poblacional con iteración simple:
$P_{t+1} = 1.2 \cdot P_t \cdot \left(1 – \frac{P_t}{100}\right)$
Toma como valor inicial $P_0 = 20$ y calcula las poblaciones en los primeros 5 tiempos $(t = 0, 1, 2, 3, 4, 5)$.
Ahora intenta graficar los valores de $P_t$ en función del tiempo para observar cómo evoluciona la población a lo largo de las iteraciones.
Ejercicio
Con diferentes valores de r (por ejemplo, r = 1.5, 2.0, 2.5, 3.0, 3.5), calcula las órbitas del sistema con un valor inicial de $P_0 = 50$ y grafica los resultados (puedes usar GeoGebra). Observa cómo cambia el comportamiento de las órbitas según el valor de r.
Ejercicio
a. ¿Qué ocurriría con la población de una especie si las condiciones iniciales cambian ligeramente?
b. ¿Cómo afecta la tasa de crecimiento a las órbitas que se generan?
5.3. El modelo logístico discreto: análisis gráfico, análisis de las órbitas, retrato fase
El modelo logístico discreto es una ecuación matemática que describe cómo crece una población cuando está limitada por los recursos del ambiente, como alimento, espacio o luz:
$x_{n+1} = r \cdot x_n \cdot (1 – x_n)$,
donde
• $x_n$ representa la población como una fracción de la capacidad de carga del entorno, por lo que $x_n \in [0, 1]$, donde 0 es la ausencia de población y 1 es la capacidad máxima del ecosistema (esta normalización permite simplificar los cálculos y generalizar el modelo para diferentes especies y ecosistemas);
• r es la tasa de crecimiento;
• $x_{n+1}$ es el tamaño de la población en la siguiente generación.
Contextualización biológica
Este modelo fue introducido por Robert May (1976) para estudiar el crecimiento de poblaciones cuando hay recursos limitados, como ocurre con especies invasoras, o incluso en modelos de depredador-presa, donde las interacciones entre especies también dependen de los recursos disponibles. A diferencia del crecimiento exponencial, que supone recursos infinitos, el modelo logístico incluye un término de autorregulación: a medida que la población se acerca a la capacidad del entorno, el crecimiento se frena.
Análisis gráfico del modelo logístico
Para analizar el comportamiento del modelo logístico, es muy útil representar gráficamente la función de recurrencia $f(x) = r x (1 – x)$ y compararla con la recta identidad $y = x$, lo que nos permite observar cómo las iteraciones del sistema evolucionan a lo largo del tiempo. El análisis gráfico nos ayuda a visualizar de manera intuitiva el comportamiento de la población, desde su crecimiento hasta su estabilización o el inicio de ciclos periódicos o caos.
Para el análisis gráfico:
Paso 1. Dibujar la parábola $y = r x (1 – x)$. Esta función es una parábola que depende del parámetro r. Para diferentes valores de r, la forma de la parábola cambia, lo que afectará el comportamiento de la población.
Paso 2. Dibujar la recta $y = x$. Esta recta sirve como referencia, ya que nos permite ver la relación entre $x_n$ y $x_{n+1}$. Los puntos de intersección entre la parábola y la recta $y = x$ son los puntos fijos del sistema.
Paso 3. Elegir un valor inicial $x_0$. A partir de este valor inicial, realizamos las iteraciones y representamos cómo se mueve el valor de $x_n$ a lo largo de los pasos de tiempo. El método más visual para hacerlo es el método de cobweb (telaraña), que traza las iteraciones en el gráfico de manera que podamos observar si la población tiende a estabilizarse, oscilar o volverse caótica, para esto:
$\quad$○ Primero, se parte de $(x_0, 0)$, subes verticalmente hasta tocar $y = r x(1 – x)$.
$\quad$○ Luego, desde ahí, vas horizontalmente hasta la recta $y = x$.
$\quad$○ Por último, repite: subes a la parábola, luego horizontal a la recta, y así iteradamente.
Visualiza cómo las iteraciones convergen (o divergen) hacia puntos fijos, ciclos o caos. Puedes incluir un diagrama con flechas o líneas que marquen cada paso.
Interpretación
• Atractores estables: si las iteraciones se acercan a un punto fijo, ese punto es un atractor estable. La población tiende a estabilizarse en ese valor a medida que pasa el tiempo.
• Puntos inestables: si las iteraciones se alejan del punto fijo, el punto es inestable, lo que significa que pequeñas perturbaciones harán que el sistema se desvíe de ese punto.
• Ciclos periódicos: en algunos valores de r, las iteraciones siguen un patrón cíclico, es decir, la población oscila entre dos o más valores en un ciclo repetitivo.
• Comportamiento caótico: para valores suficientemente altos de r, el sistema puede entrar en un comportamiento caótico, donde pequeñas diferencias en las condiciones iniciales generan trayectorias completamente diferentes.
Ejemplo gráfico
Objetivo: Observar cómo la población se estabiliza en un punto fijo usando GeoGebra.
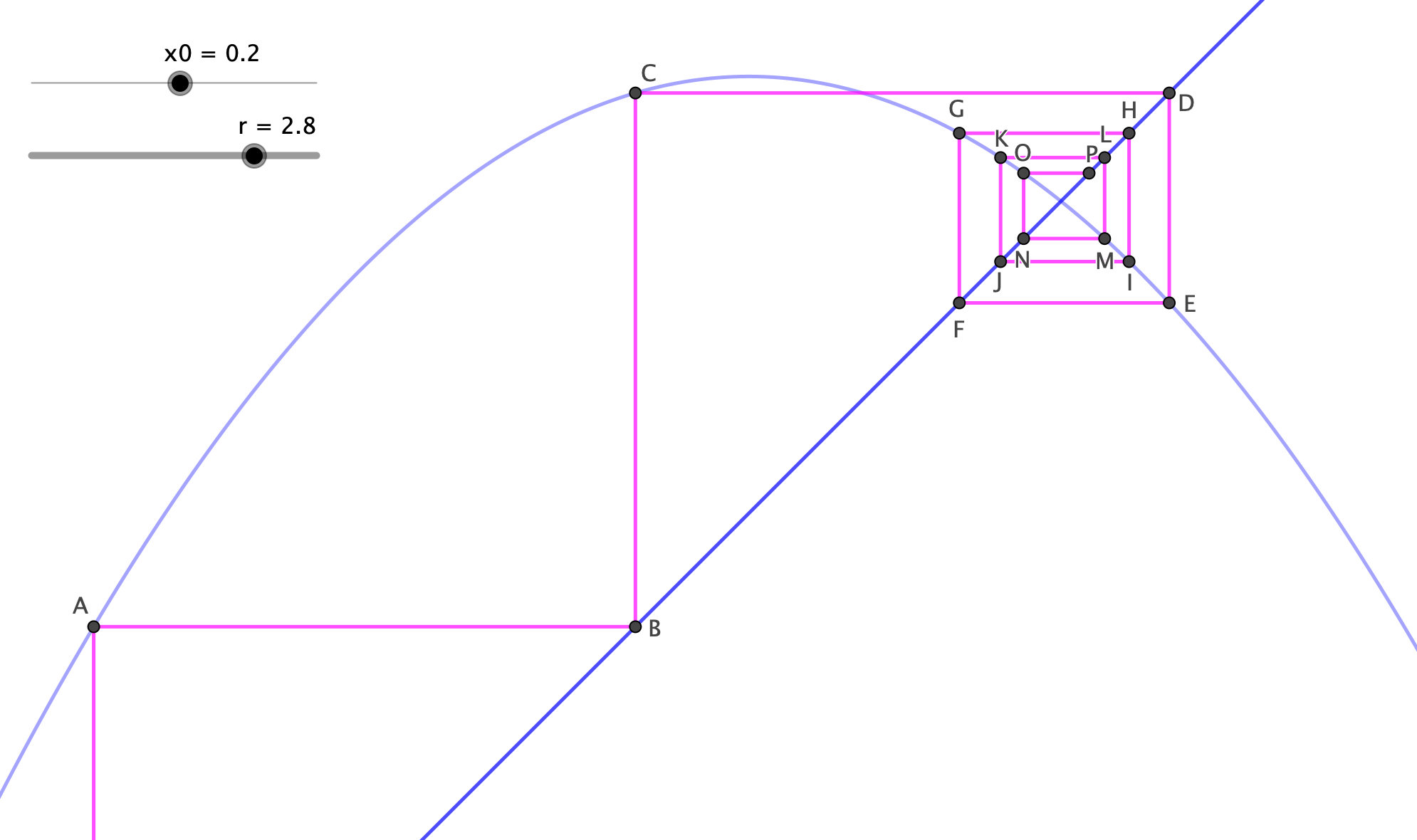
Valor inicial: $x_0 = 0.2$
Función: $f(x) = 2.8 \cdot x \cdot (1 – x)$
a) En GeoGebra
1. Abre https://www.geogebra.org/graphing, o bien, el software descargable.
2. En la barra de entrada, escribe:
$\quad$○ f(x) = 2.8 * x * (1 – x)
$\quad$○ g(x) = x (recta identidad)
3. Para dibujar la telaraña (cobweb):
$\quad$○ Define el valor inicial: x0 = 0.2
$\quad$○ Crea el primer punto vertical sobre la parábola: A = (x0, f(x0)). Esto representa $(x_0, x_1)$.
$\quad$○ Crea el primer punto horizontal sobre la recta identidad: B = (f(x0), f(x0))
$\quad$○ Dibuja los segmentos: Segment((x0, 0), A) y Segment(A, B)
$\quad$○ Repite el proceso: define C = (f(x0), f(f(x0))) y D = (f(f(x0)), f(f(x0))). Luego: Segment(B, C) y Segment(C, D)
Puedes repetir este proceso tantas veces como necesites o deeses para que puedas verificar que efectivamente el valor se acerca a un punto: eso indica estabilización.
TIP: si te parece mucho escribir, puedes usar la herramienta de punto y de segmento directamente desde los íconos de la parte izquierda de GeoGebra.
En https://www.geogebra.org/m/tm7t2hma puedes encontrar el ejemplo.
b) En Excel / Hoja de cálculo de Google
1. En la columna A, coloca los valores de n: 0 a 20.
2. En la columna B, escribe los valores de $x_n$, con $x_0 = 0.2$
$\quad$○ En B2 escribe =0.2
$\quad$○ En B3 escribe =2.8*B2*(1-B2) y copia deslizando hacia abajo.
3. En la columna C, calcula los pares $(x_n, x_{n+1})$
$\quad$○ En C3 escribe =B2
$\quad$○ En D3 escribe =B3
4. Selecciona columnas C y D para hacer un gráfico de dispersión con líneas.
5. Resultado: gráfico de telaraña en plano $x_n$ contra $x_{n+1}$
Ejercicio gráfico
Objetivo: Observar el comportamiento usando el método telaraña.
Valor inicial: $x_0 = 0.2$
Función: $f(x) = 3.5 \cdot x \cdot (1 – x)$
1. Lleva a cabo los pasos para realizar el análisis gráfico en GeoGebra.
2. Realiza el análisis gráfico ahora en una hoja de cálculo.
3. Concluye qué tipo de comportamiento observaste.
Análisis de las órbitas en el modelo logístico
Las órbitas son las trayectorias que siguen las soluciones del modelo logístico a lo largo del tiempo. Dado un valor inicial $x_0$, el modelo genera una secuencia de valores $x_0, x_1, x_2, \dots$, que corresponde al comportamiento de la población en los distintos pasos de tiempo. El comportamiento de estas órbitas depende en gran medida del valor del parámetro r, y las órbitas pueden clasificarse en varios tipos según cómo evolucionan con el paso del tiempo.
Comportamiento de las órbitas según r:
• $0 < r < 1$: la población tiende a extinguirse. Las iteraciones se acercan a 0, lo que refleja que los recursos son insuficientes para mantener la población.
• $1 < r < 3$: la población converge a un punto fijo estable, lo que significa que el sistema alcanza un equilibrio donde el tamaño de la población se estabiliza.
• $3 < r < 3.57$: el sistema puede entrar en un ciclo periódico, donde las iteraciones siguen un patrón repetitivo, aumentando la complejidad a medida que r aumenta (por ejemplo, ciclo de periodo 2, luego de periodo 4, etc.).
• $r > 3.57$: el sistema entra en un comportamiento caótico. Las pequeñas variaciones en el valor inicial de la población pueden generar trayectorias completamente diferentes, lo que hace que el sistema sea impredecible.
Estabilidad: Un punto fijo $x^*$ es estable si pequeñas perturbaciones vuelven a él con el tiempo. Matemáticamente, esto ocurre cuando la derivada de la función de recurrencia $f'(x^*)$ cumple con:
$|f'(x^*)| < 1$
También se pueden analizar órbitas periódicas y su estabilidad usando derivadas sucesivas.
Retrato fase: Se trata de una representación del comportamiento dinámico del sistema:
• En el retrato unidimensional, se puede representar simplemente la evolución de $x_n$ en el eje horizontal, como puntos sucesivos.
• También se puede representar el
retrato bidimensional como el par $(x_n, x_{n+1})$, lo que permite visualizar la dinámica como puntos en el plano, de manera que se puedan observar expresiones cíclicas o caóticas.
Analizar el retrato fase es útil porque muestra si la órbita se estabiliza, oscila o diverge, e identifica atractores, puntos fijos y ciclos periódicos.
Ejercicio gráfico
Objetivo: Comparar el comportamiento gráfico para r = 2.8, r = 3.2 y r = 3.5.
1. Abre GeoGebra.
2. Para cada valor de r:
$\quad$○ Escribe: f(x) = r * x * (1 – x) cambiando el valor.
$\quad$○ Deja siempre la recta identidad g(x) = x.
$\quad$○ Escribe el mismo valor inicial x0 = 0.2
$\quad$○ Traza al menos 15 iteraciones del método telaraña para observar si:
$\qquad$□ Converge a un punto
$\qquad$□ Oscila entre varios de manera periódica
$\qquad$□ Muestra comportamiento caótico
3. Anota lo que observaste
$\quad$○ ¿Qué tipo de comportamiento hay en cada caso?
$\quad$○ ¿Cómo lo identificaron visualmente?
En https://www.geogebra.org/m/wpurkns6 puedes encontrar la construcción en GeoGebra.