Esta es la primera entrada correspondiente al curso de análisis matemático II. Para esta primera parte del curso estudiaremos la integración de Lebesgue, una noción de integral muy poderosa y sobre la que se construye gran parte del análisis matemático moderno. Veremos una forma precisa de definir conceptos como longitud, área, volumen y sus análogos en más dimensiones: La medida de Lebesgue, sobre la cual construiremos este concepto de integración. Luego, estudiaremos las principales propiedades de la integral de Lebesgue, su relación con la integral de Riemann y una serie de teoremas muy útiles para calcular y estimar integrales: Los teoremas de convergencia y el teorema de Fubini.
Motivación
En tus cursos anteriores seguramente te has encontrado con el concepto de integral de Riemann. Ésta es una herramienta computacional muy poderosa que, a grosso modo, nos ayuda a encontrar el «área bajo la curva» en una dimensión y sus análogos en dimensiones más altas. Sin embargo, tiene una serie de limitaciones que hacen deseable un concepto de integración más general. A modo de motivación, recapitulamos algunas de ellas:
La clase de funciones integrables en el sentido de Riemann es limitada.
Como ejemplo, considera la función de Dirichlet $\chi_{\mathbb{Q}}:[0,1] \to \mathbb{R}$ definida como:
\begin{equation*} \chi_{\mathbb{Q}}(x)= \begin{cases} 1 & \text{si } x \in \mathbb{Q}\\ 0 & \text{si } x \in \mathbb{R}\setminus\mathbb{Q} \end{cases} \end{equation*}
Observa que si $[a,b]\subseteq [0,1]$ con $a<b$ entonces $\inf_{x \in [a,b]} f(x)=0$ y $\sup_{x \in [a,b]} f(x)=1$, pues $[a,b]$ contiene números racionales e irracionales.
Recordemos que en el contexto de integrales de Riemann las sumas inferiores y superiores de la función $f$, sobre una partición $P=\{a=x_0 < x_1 < \dots < x_n=b \}$ se definen como: $$L(f,P,[a,b])=\sum_{j=1}^{n}(x_j-x_{j-1})\inf_{[x_{j-1},x_j]}f$$ $$S(f,P,[a,b])=\sum_{j=1}^{n}(x_j-x_{j-1})\sup_{[x_{j-1},x_j]}f$$
Y se dice que la función es Riemman integrable si $$L(f,[a,b]):= \sup_P L(f,P,[a,b])$$ Y $$S(f,[a,b]):= \inf_P S(f,P,[a,b])$$ Coinciden. La integral de Riemann se define como el valor común: $$L(f,[a,b])=S(f,[a,b]).$$ En nuestro ejemplo, es fácil ver que $L(\chi_{\mathbb{Q}},P,[a,b])=0$, $S(\chi_{\mathbb{Q}},P,[a,b])=1$ para cualquier partición $P$, de modo que $$L(\chi_{\mathbb{Q}},[a,b])=0$$ Y $$S(\chi_{\mathbb{Q}},[a,b])=1.$$ Por lo que la función NO es Riemann integrable. Sin embargo, es natural pensar que la integral debería ser 0 pues hay «muy pocos racionales en comparación con los irracionales en $[0,1]$». El siguiente ejemplo refuerza esta intuición.
La integral de Riemann no se comporta bien bajo operaciones de límite.
Si consideramos alguna numeración de los números racionales en $\mathbb{Q}\cap [0,1]=\{ r_1,r_2, \dots\}$ y para cada $k\in \mathbb{Z^+}$ definimos $f_k:[0,1]\to\mathbb{R}$ como:
\begin{equation*} f_k(x)= \begin{cases} 1 & \text{si } x \in \{ r_1,r_2,\dots, r_k \}\\ 0 & \text{en otro caso } \end{cases} \end{equation*}
Se verifica que $f_k$ es Riemann integrable y $\int_0^1f_k(x) \mathrm{d} x=0$, pues $f$ es acotada y vale 0 salvo en una cantidad finita de puntos.
Observa que si $x$ es irracional, $f_k(x)=0$ $\forall k$; y si $x$ es racional, $x=r_N$ para algún $N$ de modo que $f_k(x)=1$ $\forall n\geq N$. Esto nos dice que $\chi_{\mathbb{Q}}$ es el límite puntual de la sucesión de funciones $f_k$ pero $\chi_{\mathbb{Q}}$ no es Riemann integrable.
En el ejemplo anterior la sucesión $f_k$ se puede modificar para hacerla continua o incluso suave. Piensa por ejemplo en sustituir las discontinuidades de salto por crestas de funciones lineales a pedazos o pulsos suaves cuya anchura se va haciendo arbitrariamente pequeña. En general, esto nos dice que la clase de funciones Riemann integrables no es cerrada bajo toma de límites (puntuales), ni siquiera si las funciones son «bien portadas».
Con nociones más fuertes de convergencia, por ejemplo convergencia uniforme (una hipótesis muy «fuerte»), se tienen mejores resultados respecto a toma de límites. El siguiente es bien conocido:
Teorema. Sea $f_k:[a,b]\to \mathbb{R}$, $k\in \mathbb{N}$, una sucesión de funciones Riemann integrables que convergen uniformemente a $f:[a,b]\to \mathbb{R}$. Entonces $f$ es Riemann integrable y además $$\lim_{k\to \infty}\int_a^b f_k(x) \ \mathrm{d}x=\int_a^b f(x) \ \mathrm{d}x.$$
$\square$
También en el contexto de toma de límites, otra pregunta relevante es ¿bajo qué condiciones la integral conmuta con un límite?, o al menos ¿se puede decir algo sobre la integral de un límite?. Estas son preguntas que surgen normalmente en áreas como ecuaciones diferenciales, análisis de Fourier o probabilidad, en la que muchos conceptos se definen precisamente como un límite (por ejemplo la derivada o las series de Fourier). El ejemplo anterior no es muy esperanzador pues puede que un límite puntual ni siquiera sea Riemann integrable. Bajo ciertas condiciones sí se puede decir algo, por ejemplo:
Teorema (de la convergencia acotada). Sea $f_k:[a,b] \to \mathbb{R}$ una sucesión de funciones Riemann integrables y acotadas tales que $\exists M\in \mathbb{R}$ tal que $|f_k(x)|\leq M$ para todo $k\in \mathbb{N}$ y $x\in [a,b]$. Si $f_k$ convergen puntualmente a $f$ y $f$ es Riemann integrable, entonces $$\lim_{k \to \infty} \int_{a}^{b} f_k(x) \ \mathrm{d} x=\int_{a}^{b} f(x) \ \mathrm{d} x.$$
$\square$
¿Habrá alguna noción de integración que sea más laxa respecto a toma de límites?¿Se podrán mejorar los resultados enunciados?
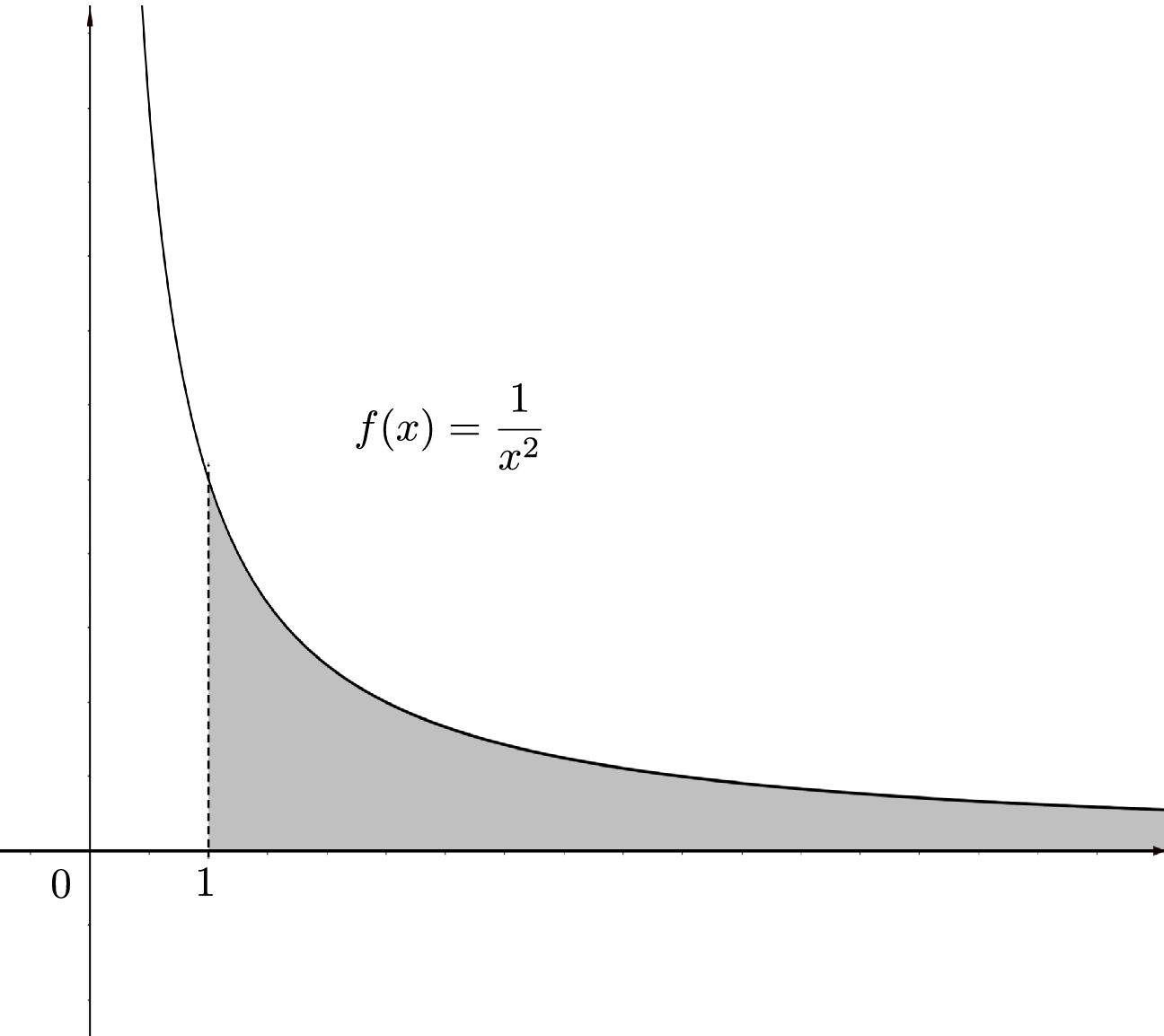
La integral de Riemann no maneja adecuadamente funciones no acotadas o dominios no acotados.
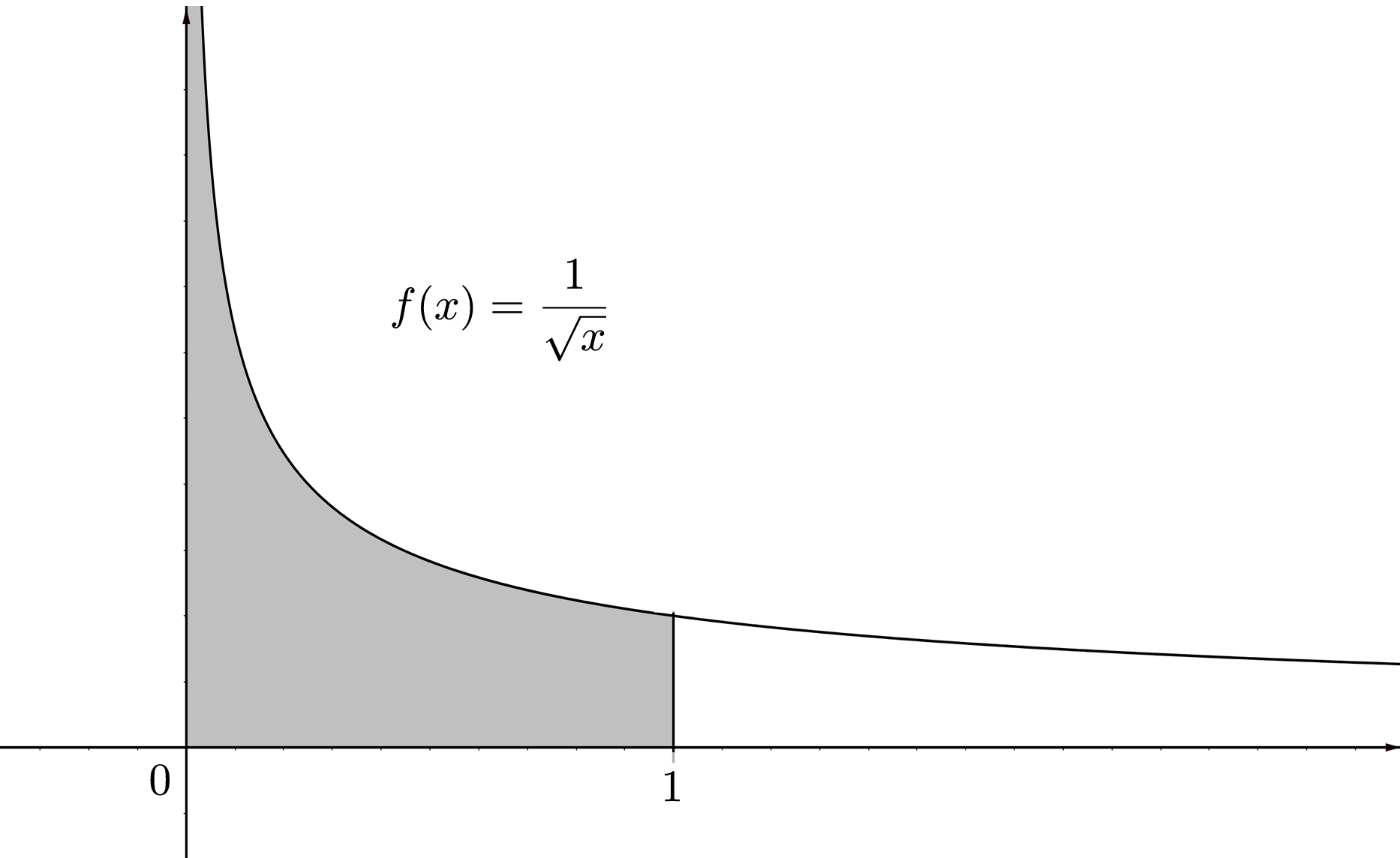
Por definición, la integral de Riemann se define para funciones acotadas sobre intervalos cerrados finitos. Para funciones no acotadas o dominios no acotados la forma clásica de abordar estos problemas es con integrales impropias. Considera los siguientes ejemplos:
Ejemplo. La función $f(x)=\frac{1}{\sqrt{x}}$ no está acotada en $[0,1]$, sin embargo podemos hablar de área bajo la curva con la integral impropia:
Integrales de este tipo suelen abundar en física y probabilidad. ¿Habrá algún modo de manejar este tipo de integrales de forma unificada?
Fue precisamente por esta clase de restricciones que a finales del siglo XIX se empezaron a buscar nociones distintas o más generales de integración. Fue precisamente Henri Lebesgue quien en 1901 publicó su famoso artículo Sur une généralisation de l’intégrale définie, en el que definía una noción de integración que generalizaba a la de Riemann y resolvía varias de las limitaciones que esta presentaba.
La teoría de integración de Lebesgue y la teoría de la medida han sido tremendamente exitosas en el análisis moderno y ha encontrado aplicaciones fundamentales en áreas como la probabilidad, las ecuaciones diferenciales, la física matemática, entre otras.
Bibliografía
El material presentado en estas notas se basa en elementos tomados de la siguiente bibliografía, todas excelentes fuentes de consulta.
Folland, Gerald B. Real analysis: modern techniques and their applications. John Wiley & Sons, 1999.
Jones, Frank. Lebesgue integration on Euclidean space. Jones & Bartlett Learning, 2001.
Stein, Elias M., and Rami Shakarchi. Real analysis: measure theory, integration, and Hilbert spaces. Princeton University Press, 2009.
Tao, Terence. Analysis II. Springer Singapore, 2016.
Wheeden, Richard Lee, and Antoni Zygmund. Measure and integral. Vol. 26. New York: Dekker, 1977.
Más adelante…
Abordaremos el problema de la medida sobre los conjuntos más sencillos: los rectángulos. Veremos algunos resultados técnicos que utilizaremos a lo largo de la construcción de la medida de Lebesgue.
La modelación matemática es la herramienta que sirve para representar sistemas naturales y entender cómo funcionan, además de predecir y analizar comportamientos y encontrar soluciones de problemas sobre sistemas complejos.
1.1. ¿Qué es y para qué sirve un modelo matemático?
¿Qué es un modelo matemático?
Un modelo matemático es una representación abstracta de un sistema real. Utiliza variables, ecuaciones matemáticas, funciones o algoritmos para describir cómo interactúan estos elementos. Como se mencionó anteriormente, los modelos son herramientas para simplificar, entender, estudiar y predecir comportamientos de sistemas complejos, como los ecosistemas, el crecimiento de poblaciones, la difusión de enfermedades, entre otros. Por ejemplo, en biología, un modelo podría representar la dinámica de una población, utilizando factores como la tasa de natalidad, mortalidad y recursos disponibles.
¿Para qué sirve un modelo matemático?
Predecir: los modelos matemáticos pueden predecir futuros comportamientos bajo condiciones específicas. Según Allman y Rhodes, “los modelos permiten entender las consecuencias que una ecuación puede tener a través del análisis matemático, para así poder comparar la formulación con observaciones biológicas” (Allman, p. 1). Por ejemplo, si se conoce la cantidad de individuos que tiene una población y cuántos nacen y mueren cada año, se puede predecir la población que habrá en algún momento del futuro. Esto es útil para la conservación de especies.
Simular: se pueden crear diferentes escenarios para explorar los resultados de diferentes intervenciones, por lo que se puede practicar la «prueba y error» las veces necesarias sin consecuencias dañinas para un ecosistema. Por ejemplo, si se deseara saber qué pasaría si se introdujera un nuevo depredador en un ecosistema, un modelo puede ayudar a ver cómo esto afectaría a la población sin tener que hacer un experimento real que podría ser perjudicial.
Optimizar: en algunos casos, los modelos se utilizan para encontrar la mejor estrategia o solución a un problema, como en el control de plagas, sin embargo, la optimización busca no solo eficiencia, sino también sostenibilidad y equilibrio en la gestión de recursos naturales, Britton señala que “las políticas de gestión de recursos pueden derivarse de modelos matemáticos” (Britton, p. 45). Por ejemplo, si se trabaja en la gestión de un área natural, es posible usar un modelo para determinar cómo distribuir los recursos de manera eficiente, asegurando tanto la salud del ecosistema como su sostenibilidad a largo plazo.
Comprender: los modelos también son herramientas educativas, ayudan a visualizar y entender relaciones complejas. Según Kline, “las matemáticas nos permiten observar patrones y relaciones” (Kline, p. 5), al representar gráficamente los datos y las relaciones, se pueden observar patrones que no son obvios sólo al mirar los números.
1.2. De la biología al modelo y de regreso: Supuestos, limitaciones y predicciones verificables
Para pasar de un fenómeno biológico real a un modelo matemático se deben hacer suposiciones que son fundamentales para construir dicho modelo, pero es importante considerar que también imponen limitaciones sobre qué tan exacto o útil será en ciertos contextos. Los sistemas biológicos pueden involucrar una “gran cantidad de interacciones y predisposiciones que compiten entre sí, lo que puede dificultar la comprensión completa de un fenómeno en su totalidad” (Allman, p. 1). Por esta razón, los modelos matemáticos deben simplificar estos sistemas, enfocándose en los factores más relevantes, pero esta simplificación puede llevar a la omisión de detalles importantes y afectar la precisión de las predicciones en algunos escenarios.
Observación. Todo comienza con la observación, es importante prestar atención a todas las variables que pueden intervenir o afectar el desarrollo de un evento.
Supuestos. Al momento de realizar suposiciones se deben considerar aspectos como • Homogeneidad: suposición de que el sistema es uniforme en ciertas características, por ejemplo, asumir que todos los individuos de una población tienen la misma tasa de crecimiento. • Condiciones iniciales conocidas: los modelos suelen necesitar condiciones iniciales específicas para poder ser resueltos, por ejemplo, la cantidad inicial de individuos en una población. • Aislamiento de factores externos: a veces se puede asumir que el sistema es cerrado, es decir, que no influyen factores externos, para facilitar el análisis.
Limitaciones. Los modelos son abstracciones de la realidad que nunca podrán representar todos los factores posibles que influyen en un sistema biológico, por lo que es importante reconocer que todos los modelos tienen limitaciones. Según Allman, “aunque muchos de los modelos que examinamos pueden parecer al principio simplificaciones burdas, su misma simplicidad es una fortaleza. Los modelos simples muestran claramente las implicaciones de nuestros supuestos más básicos» (Allman, p . 1). En otras palabras, aunque los modelos matemáticos omiten muchos detalles, esta simplificación les permite centrarse en los aspectos fundamentales del fenómeno. Por ejemplo, en un modelo de crecimiento poblacional tal vez no se consideren detalles como la competencia entre especies o las interacciones con otras especies. Otra limitación puede ser la escalabilidad; un modelo que funciona a pequeña escala (como en un laboratorio) puede no ser válido cuando se aplica a una escala mayor (por ejemplo, en un ecosistema natural).
Predicciones verificables. Los modelos matemáticos tienen que ser capaces de hacer predicciones que puedan ser verificadas empíricamente mediante experimentos u observaciones. Es fundamental que un modelo no solo explique o demuestre lo que ya se sabe, sino que también permita visualizar comportamientos futuros. Si las predicciones del modelo se verifican mediante datos reales, esto aumenta la confiabilidad del modelo.
Ejemplo Imagina que estás modelando el crecimiento de una población de bacterias. Supón que el modelo establece que la población crece de acuerdo con la ecuación de Malthus. Si realizas experimentos y observas que la población crece más lentamente debido a la competencia por recursos, tu modelo necesitará ajustarse para reflejar este nuevo factor (por ejemplo, usando un modelo logístico que limite el crecimiento cuando la población se acerca a la capacidad de carga).
Pasos para crear un modelo. Supongamos que estamos interesados en modelar el crecimiento de una población de bacterias en un cultivo cerrado -es decir, sin interferencia externa- en un laboratorio, donde la bacteria se reproduce a través de divisiones celulares. Empezaremos desde la observación y avanzaremos paso a paso.
1. Observación. En este caso, se pueden hacer las siguientes observaciones:
Se sabe que las bacterias en un cultivo crecen a una tasa proporcional a su población actual.
En un principio, se tiene un número pequeño de bacterias (supongamos 100), y después de cierto tiempo, el número de bacterias aumenta.
No hay depredadores, no hay competencia por recursos en las primeras etapas, y el entorno es ideal para su crecimiento.
2. Identificación de Variables. En cualquier modelo, primero es necesario identificar las variables involucradas.
Variable dependiente (a modelar): N(t) es el número de bacterias en el tiempo t.
Variable independiente: t es el tiempo, generalmente en horas, días, o cualquier unidad pertinente.
Parámetro constante: r es la tasa de crecimiento de la población (la tasa de natalidad). Esto indica cuántas bacterias nuevas nacen por cada bacteria existente en un tiempo determinado.
3. Supuestos. Para simplificar el problema y poder construir un modelo matemático, necesitamos hacer algunos supuestos que describen cómo el sistema se comporta:
Supuesto 1: El entorno es ideal para el crecimiento bacteriano; no hay limitación de recursos.
Supuesto 2: La tasa de crecimiento r es constante durante todo el proceso.
Supuesto 3: Las bacterias se dividen de manera exponencial, es decir, cada bacteria produce exactamente dos hijas en un tiempo fijo.
Supuesto 4: El número de bacterias en el tiempo t = 0 es conocido, es decir, tenemos un número inicial $N_0$ de bacterias.
4. Limitaciones. Ahora, debemos tener en cuenta algunas limitaciones que podrían afectar la validez de nuestro modelo:
Limitación 1: Este modelo no tiene en cuenta mutaciones o factores estocásticos (azar), como la posibilidad de que algunas bacterias no se reproduzcan debido a variabilidad genética o factores aleatorios.
Limitación 2: El modelo no incluye interacciones con otras especies, como bacterias depredadoras o interacciones simbióticas que podrían alterar el crecimiento.
5. Formulación del modelo. El siguiente paso es escribir la ecuación matemática que describe el fenómeno. Con base en nuestras observaciones, sabemos que el crecimiento bacteriano sigue una ley de crecimiento exponencial. En el capítulo 1, Britton discute el crecimiento de poblaciones y la ecuación diferencial $\frac{dN}{dt} = r N(t)$ –que es ampliamente utilizada para modelar este tipo de fenómenos–, donde:
$\frac{dN}{dt}$ es la tasa de cambio de la población de bacterias con respecto al tiempo (es decir, cuántas bacterias están naciendo por unidad de tiempo),
r es la tasa de crecimiento de la población,
N(t) es el número de bacterias en el tiempo t.
Esta es una ecuación diferencial que describe cómo cambia la población de bacterias con el tiempo. Para obtener la expresión de N(t), resolvemos esta ecuación diferencial. La solución es:
$N(t) = N_0 e^{rt}$
donde
$N_0$ es el número inicial de bacterias en t = 0,
e es la base del logaritmo natural.
Este modelo nos dice que el número de bacterias crece exponencialmente en función del tiempo, con una tasa de crecimiento r.
6. Verificación del Modelo. Finalmente, se verifica el modelo utilizando datos reales o se realiza el experimento para comprobar si las predicciones del modelo son correctas.
Un caso práctico de verificación Supongamos que, en un experimento real, comenzamos con una población de 100 bacterias (es decir, $N_0 = 100$) y que después de 2 horas ya hay 400 bacterias. Para comprobar si el modelo puede predecir este comportamiento usamos la fórmula del modelo:
$N(t) = N_0 e^{rt}$
Sabemos que $N_0 = 100$, t = 2 horas, y N(t) = 400. Sustituimos en la fórmula
$400 = 100 e^{r \cdot 2}$
Despejamos r
$4 = e^{2r}$
Tomamos el logaritmo natural en ambos lados
$\ln(4) = 2r$
$r = \frac{\ln(4)}{2} \approx 0.6931$
Ahora, sabemos que la tasa de crecimiento r es aproximadamente 0.6931 por hora. Podemos usar este valor para hacer más predicciones y compararlas con los datos reales.
Predicción adicional Supongamos que queremos saber cuántas bacterias habrá después de 5 horas. Usamos el modelo con r = 0.6931:
Esto nos da una predicción de que habrá 3200 bacterias después de 5 horas.
Si el número real de bacterias se acerca a este valor, podemos estar bastante seguros de que nuestro modelo está funcionando bien. Si no es así, será necesario ajustar el modelo, considerar efectos de límite de recursos (como el modelo logístico), o incorporar factores estocásticos.
Resumen del procedimiento:
Observación: se identifica el fenómeno a estudiar (crecimiento de bacterias).
Identificación de variables: se determina qué variables son importantes (número de bacterias, tiempo, tasa de crecimiento).
Supuestos: se realizan suposiciones sobre el entorno ideal, el crecimiento exponencial y las condiciones iniciales.
Limitaciones: se considera que el modelo tiene limitaciones como el crecimiento ilimitado y la falta de factores estocásticos.
Formulación del modelo: se desarrolla una ecuación diferencial para modelar el crecimiento exponencial de las bacterias.
Verificación: se comprueban las predicciones del modelo con datos reales del experimento.
1.3. Tipos de modelos: Deterministas vs. Estocásticos
Modelos deterministas. Son aquellos que producen resultados predecibles, es decir que están completamente definidos y se puede calcular exactamente lo que sucederá. En otras palabras, no hay incertidumbre; dado un conjunto de condiciones iniciales y parámetros, el modelo siempre dará el mismo resultado. Como menciona Britton, en un modelo determinista, “el estado del sistema en el tiempo t + 1 se determina completamente a partir del estado en el tiempo t» (Britton, p. 2). Estos modelos se suelen representar con ecuaciones diferenciales o sistemas algebraicos que describen el comportamiento del sistema en función del tiempo.
Por ejemplo, el modelo de crecimiento exponencial es un modelo determinista, donde la población crece de manera predecible si no hay factores limitantes: $N(t) = N_0 e^{rt}$ donde N(t) es el tamaño de la población en el tiempo t, $N_0$ es el tamaño inicial de la población, y r es la tasa de crecimiento constante.
Modelos estocásticos. En estos modelos hay incertidumbre, el azar juega un papel importante. Los resultados pueden variar incluso con las mismas condiciones iniciales; el sistema no sigue un camino único, sino que puede tener varios resultados posibles debido a la inclusión de variables aleatorias o probabilísticas. Son útiles cuando se requiere modelar fenómenos como las fluctuaciones en una población debido a factores aleatorios (mutaciones genéticas, migración, dispersión). Un ejemplo claro puede ser la modelación de la propagación de una enfermedad infecciosa en una población, donde la tasa de infección no es constante, sino que depende de la probabilidad de contacto entre individuos. En un modelo estocástico, la distribución de probabilidades es clave.
Referencias bibliográficas
Allman, E. S. & J. A. Rhodes. 2007. Mathematical models in biology: an introduction. Cambridge University Press, Cambridge. Britton, N. F. 2003. Essential mathematical biology. Springer, Cham. Kline, M. 1967. Mathematics for the nonmatemathician. Dover, Nueva York.
Evaluación
1. Responde y haz lo que se indica
a. ¿Qué es un modelo matemático? Escribe una definición simple de qué es un modelo matemático en el contexto de las ciencias. Explica brevemente por qué es útil tener un modelo en lugar de estudiar un fenómeno de forma directa.
b. Menciona al menos tres ventajas de usar modelos matemáticos en biología.
c. Define qué son los supuestos en un modelo matemático. Da un ejemplo de un supuesto que podrías hacer si estás modelando el crecimiento de una población de bacterias.
d. ¿Por qué es importante conocer las limitaciones de un modelo matemático? Explica qué podría suceder si un modelo no tiene en cuenta factores importantes (como la competencia entre especies o los recursos limitados en un ecosistema).
e. Explica la diferencia entre un modelo determinista y un modelo estocástico. Usa un ejemplo sencillo para ilustrar la diferencia. Por ejemplo, si estás modelando el crecimiento de una población de bacterias, ¿cuál sería un modelo determinista y cuál uno estocástico?
f. Imagina que estás modelando el crecimiento de una población de animales en un hábitat. Si se incluye una probabilidad de que cada individuo muera debido a condiciones ambientales impredecibles, ¿cómo se llamaría este tipo de modelo? Justifica tu respuesta.
g. Imagina que tienes una población de 1000 bacterias en un cultivo cerrado. Esta población crece a una tasa constante de 0.2 por hora. Si se mantiene esta tasa de crecimiento, ¿cómo describirías el comportamiento de la población en términos matemáticos?
h. ¿Este es un modelo determinista o estocástico? ¿Por qué?
Respuesta modelo: Este modelo es determinista, ya que asume que la tasa de crecimiento es constante, r = 0.2, y que el crecimiento de la población depende únicamente de este parámetro, sin ningún componente aleatorio.
i. ¿Cuáles serían algunos supuestos de este modelo? Piensa en qué asumes sobre el comportamiento de las bacterias, el ambiente, o cualquier otro factor relevante.
j. ¿Por qué es importante verificar las predicciones de un modelo matemático con datos reales o experimentales? Explica cómo se puede hacer para comprobar si un modelo matemático está funcionando correctamente.
k. Si tienes un modelo de crecimiento de una población de plantas en un invernadero, ¿qué tipo de datos recolectarías para comparar con las predicciones del modelo?
Pregunta de Reflexión:
¿Qué importancia tiene comprender los supuestos y las limitaciones de un modelo matemático cuando se usan para tomar decisiones en biología (por ejemplo, para la conservación de especies, el manejo de recursos naturales, etc.)?
Las proporciones nos permiten comparar partes de un todo y entender las relaciones cuantitativas entre diferentes elementos. Las concentraciones son esenciales para comprender cómo interactúan los compuestos en soluciones, lo cual es crucial para procesos biológicos como la difusión de nutrientes, el transporte de gases y la regulación de los ecosistemas.
2.1. Representación de fracciones en forma decimal y porcentual
Las fracciones, decimales y porcentajes son tres formas diferentes de representar una parte de un todo. Estos tres conceptos se utilizan en biología para representar datos relacionados con concentraciones, proporciones de especies en una población, etc.
Una fracción es una forma de representar una parte de una unidad. Se representa como $\frac{a}{b}$, donde a es la parte y b es el todo, por ejemplo, $\frac{1}{2}, \frac{3}{4}$, etc.
Un número decimal es una fracción cuyo denominador es una potencia de 10, y se utiliza la notación posicional para expresar las fracciones de manera más sencilla. Los números decimales pueden clasificarse en tres tipos:
Decimales exactos: son aquellos que tienen un número finito de dígitos después del punto decimal. Por ejemplo, $0.5 = \frac{1}{2}$ o $0.75 = \frac{3}{4}.$
Decimales periódicos: son los que, después del punto decimal, tiene una cola infinita de decimales en un patrón fijo, este patrón se denomina período. Por ejemplo, el número $0.\overline{3}$, que es igual a $\frac{1}{3}$, tiene un período de 3. Otro ejemplo es $0.\overline{142857}$ que es equivalente a $\frac{1}{7}. Siempre son racionales.$
Decimales no periódicos: son aquellos que no repiten ningún patrón y tienen una secuencia infinita de dígitos después del punto decimal. Un ejemplo de este tipo de decimal es $\pi = 3.14159265358979…$, que continúa sin repetirse y sin un patrón predecible. Los decimales no periódicos corresponden a números irracionales.
Porcentajes: es una forma de expresar un número como una fracción de 100, es decir, una fracción multiplicada por 100, por ejemplo $\frac{1}{2} = 0.5 = 50 %$.
Ejemplo. Si se tiene una solución con 25 gramos de sal disueltos en 500 gramos de agua, ¿cuál es la concentración de sal en porcentaje? Paso 1. Se calcula la fracción de sal: $\frac{25}{500} = \frac{1}{20} = 0.05$. Paso 2. Para convertirlo a porcentaje, se multiplica por 100: 0.05 × 100 = 5 %. Esto significa que la solución tiene una concentración del 5 % de sal.
Ejercicio. Si se tiene una solución con 10 gramos de azúcar disueltos en 250 gramos de agua, ¿cuál es la concentración de azúcar en porcentaje?
2.2. Aplicaciones: concentraciones (salinidad, CO2 atmosférico), preparación de soluciones
Las concentraciones son importantes para entender muchos procesos biológicos, por ejemplo para medir la cantidad de alguna sustancia en un medio. Se pueden expresar de diferentes formas, como la concentración molar, la fracción molar, la molalidad, entre otras; esto es fundamental en áreas como la biología celular, la ecología (concentración de gases como CO2 en la atmósfera) o la farmacología (concentración de medicamentos en sangre).
Concentración molar (M) La molaridad (M) es una medida de concentración que expresa la cantidad de moles de soluto por litro de solución. Un mol es una unidad utilizada en química para expresar una cantidad específica de partículas como átomos, moléculas o iones. Un mol contiene aproximadamente $6.022 \times 10^{23}$ partículas, un número conocido como el número de Avogadro. La concentración molar se define matemáticamente de la siguiente manera:
$M = \frac{\text{moles de soluto}}{\text{volumen de solución en litros}}$
Ejemplo. Si se disuelve 1 mol de NaCl (sal común) en 1 L de agua, entonces la solución tendrá una concentración de 1 M.
Concentración en porcentaje (porcentaje en masa) A veces se utilizan porcentajes para expresar la concentración de una solución en términos de la masa de soluto respecto a la masa total de la solución, y se calcula de la siguiente manera:
$\text{Porcentaje en masa} = \left( \frac{\text{masa de soluto}}{\text{masa de solución}} \right) \times 100$
Ejemplo. Si se tienen 10 g de sal disueltos en 90 g de agua, ¿cuál sería la concentración en porcentaje?
Salinidad Se refiere a la cantidad de sal disuelta en agua. Es un concepto de importante uso por ejemplo en los ecosistemas marinos, para medir la salinidad y entender el equilibrio de especies acuáticas. Se puede expresar como partes por mil (ppm), que equivale a la masa de sal disuelta en mil partes de agua. En volumen, 1 ppm = 1 mL por m³ = 1 μL por litro.
Ejemplo. En el océano, la salinidad promedio es de aproximadamente 35 ppt, por lo tanto, en cada litro de agua hay 35 gramos de sales disueltas.
Ejercicio. Si se tienen 200 mL de agua y se añaden 10 g de sal, ¿cuál será la concentración de sal en la solución?
Concentración de CO2 Para la biología ambiental, medir la concentración atmosférica de dióxido de carbono, CO2, es esencial para estudiar el cambio climático y su impacto sobre los ecosistemas. Se expresa en partes por millón (ppm), esto indica cuántas moléculas de CO₂ hay por cada millón de moléculas de aire.
Ejercicio. Si la concentración de CO2 en la atmósfera es de 400 ppm (partes por millón), esto significa que en un millón de partes de aire, 400 partes son de CO2. Si se tiene 1 litro de aire, ¿cuántos mililitros de CO2 hay en ese volumen?
Ejercicio. En un ambiente cerrado, la concentración de oxígeno es del 21 %. Si hay 50 litros de aire, ¿cuántos litros de oxígeno hay en total?
2.3. Conversión entre porcentajes, fracciones y cantidades absolutas
La conversión entre fracciones, porcentajes y cantidades absolutas es frecuente cuando se trabaja con datos biológicos como concentraciones en soluciones, porcentajes de población o mediciones de otros parámetros biológicos, por dar algunos ejemplos.
Conversión de fracción a porcentaje Para convertir una fracción a porcentaje, se debe encontrar una fracción equivalente cuyo denominador sea 100, ya que buscamos la cantidad n de cada 100, es decir, el tanto por ciento. Basta con multiplicar la fracción por 100. Otra opción puede ser convertir primero la fracción a número decimal realizando la división, y luego multiplicar por 100.
Ejemplo. Si una población tiene $\frac{1}{5}$ de individuos infectados por una enfermedad, ¿a qué porcentaje de la población equivale?
o bien $\frac{1}{5} = 0.2 \Rightarrow 0.2 \times 100 = 20$.
Entonces $\frac{1}{5}$ de individuos equivale al 20 % de la población.
Ejercicio. Si en un grupo de 40 estudiantes, 10 han completado su tarea. ¿Qué porcentaje de estudiantes ha completado su tarea?
Ejercicio. Si en una población de 200 árboles, 60 son de especies invasoras. ¿Qué porcentaje de los árboles corresponde a los no nativos?
Conversión de porcentaje a fracción Para convertir un porcentaje a fracción se debe dividir entre 100 para obtener la fracción decimal que luego se simplificará.
Ejemplo. Si el 30% de una solución es NaCl (sal), ¿qué fracción representa esta concentración? $30 % = \frac{30}{100}$, luego se simplifica la fracción dividiendo tanto el numerador como el denominador entre su máximo común divisor (MCD), en este caso es 10:
$\frac{30}{100} = \frac{3}{10}$
Por lo tanto, 30% equivale a $\frac{3}{10}$.
Ejercicio. Si el 40% de una población de bacterias está infectada, ¿qué fracción representa el porcentaje de bacterias infectadas?
Conversión de un porcentaje a cantidad absoluta A veces es útil o necesario convertir un porcentaje a una cantidad absoluta, por ejemplo de una sustancia en una solución o población. Esto es particularmente útil cuando se manejan concentraciones en una solución o porcentajes en una muestra biológica. Para convertir un porcentaje a cantidad absoluta, se puede encontrar su expresión en fracción decimal y luego multiplicar por el total.
Ejemplo. Si se tiene una solución de 500 mL y la concentración de sal es del 10 %, ¿de cuánto sería la cantidad de sal en la solución?
Ejercicio. Si un ecosistema tiene 1000 g de carbono y el 20 % está almacenado en las raíces de las plantas, ¿cuántos gramos de carbono están almacenados en las raíces?
Ejercicio. Si en un ecosistema con 5000 g de nitrógeno, el 15 % está presente en el suelo, ¿cuántos gramos de nitrógeno hay en el suelo?
Conversión de cantidad absoluta a porcentaje Si tienes una cantidad conocida de una sustancia en una solución y quieres expresar su concentración en porcentaje, puedes usar la fórmula:
$\text{Porcentaje} = \left( \frac{\text{cantidad de soluto}}{\text{cantidad total de la solución}} \right) \times 100$
Ejemplo. Si en un recipiente con 500 g de una solución hay 125 g de azúcar, ¿qué porcentaje de la solución es azúcar?
$\frac{125}{500} \times 100 = 25$, por lo tanto, 25 % de la solución es azúcar.
Ejercicio. Si en una solución de 600 g, 150 g corresponden a sal, ¿qué porcentaje de la solución es sal?
Conversión de fracción a cantidad absoluta Para convertir una fracción a cantidad absoluta, se multiplica el total por la fracción.
Ejemplo. Si en una muestra de 200 g de agua, $\frac{3}{4}$ es agua dulce, ¿cuántos gramos de agua dulce hay?
Para convertir una fracción a cantidad absoluta, multiplicamos el total (200 g) por la fracción:
$200 \times \frac{3}{4} = 150$, por lo tanto, 150 g de la muestra corresponden a agua dulce.
Ejercicio. En una solución de 1000 g de sangre, $\frac{2}{5}$ es plasma. ¿Cuántos gramos de plasma hay en la muestra?
Evaluación. Proporciones, concentraciones y soluciones
1. Responde
a. En un estudio ecológico, se observa que de un total de 1000 árboles en un bosque, 300 son de una especie invasora. ¿Qué porcentaje de los árboles del bosque son de especies invasoras?
b. En una población de 1200 bacterias, 0.75 de ellas están infectadas por una enfermedad. ¿Qué fracción representa la población infectada?
c. Si una solución tiene 50 gramos de azúcar disueltos en 200 gramos de agua, ¿cuál es la concentración de azúcar en porcentaje?
d. En un ecosistema marino, la salinidad promedio es de 35 ppt. ¿Cuántos gramos de sal hay disueltos en 2 litros de agua?
e. Una solución acuosa contiene 2 moles de NaCl (sal común) disueltos en 1 litro de agua. ¿Cuál es la concentración molar de la solución?
f. En un laboratorio, se preparó una solución disolviendo 15 gramos de glucosa (C₆H₁₂O₆) en 150 ml de agua. Si la densidad del agua es aproximadamente 1 g/ml, ¿cuál es la concentración de glucosa en porcentaje en masa?
g. La concentración de CO₂ en la atmósfera es de 400 ppm. Si tomamos una muestra de aire de 2 metros cúbicos (2000 litros), ¿cuántos litros de CO₂ están presentes en esa muestra?
h. En un ecosistema terrestre, se sabe que el 20 % del nitrógeno en el suelo está presente como amoníaco (NH₃). Si en total hay 3000 g de nitrógeno en el suelo, ¿cuántos gramos de nitrógeno están presentes como amoníaco?
i. Si el 15 % de una población de 2000 insectos está infectada por un virus, ¿cuántos insectos están infectados?
j. En un ecosistema acuático, el 40 % del oxígeno en el agua es consumido por organismos acuáticos. Si hay 5000 litros de agua en un estanque, ¿cuántos litros de oxígeno son consumidos por los organismos?
k. Si en una solución de 300 mL de agua, el 10 % está compuesto por sales minerales, ¿cuál es la cantidad absoluta de sales en la solución?
l. Un investigador mide que en un ecosistema existen 100 g de carbono. Si el 25 % de ese carbono está almacenado en las raíces de las plantas, ¿cuántos gramos de carbono están almacenados en las raíces?
m. Si en una solución de 400 g de agua, $\frac{2}{5}$ de ella es agua dulce, ¿cuántos gramos de agua dulce hay en la solución?
n. En un ecosistema forestal, la fracción de árboles jóvenes es $\frac{3}{8}$. Si hay un total de 1600 árboles en el bosque, ¿cuántos árboles son jóvenes?
o. En un laboratorio de biología, se prepara una solución con 250 g de una sustancia en 1250 g de agua. ¿Cuál es la concentración de la sustancia en porcentaje?
p. Una solución tiene una concentración de 5 % de NaCl en masa. Si la masa total de la solución es 400 g, ¿cuántos gramos de NaCl hay en la solución?
q. En un ecosistema marino, la salinidad es de 40 ppt. Si se tiene 500 litros de agua de mar, ¿cuántos gramos de sal hay disueltos en esa cantidad de agua?
r. Un experimento muestra que el 30 % del oxígeno en una muestra de aire está en forma de ozono (O₃). Si hay 2000 mL de aire, ¿cuántos mililitros de ozono hay en la muestra?
s. En una plantación de árboles, el 40 % de los árboles son de una especie nativa y el resto son de especies no nativas. Si hay 1200 árboles en total, ¿cuántos árboles son no nativos? Si además, del 40 % de árboles de especies nativas, 15 % son especies en peligro de extinción, ¿a qué porcentaje del total representa esa cantidad?
t. Si en un ecosistema hay 5 toneladas de carbono, y el 40 % de ese carbono se encuentra almacenado en los organismos del ecosistema, ¿cuántas toneladas de carbono están almacenadas en los organismos?
u. La concentración de dióxido de carbono (CO₂) en un ambiente cerrado es de 500 ppm. Si el volumen total de aire es 10 m³ (10 000 L), ¿cuántos mililitros de CO₂ están presentes en el ambiente?
v. En un experimento de difusión, se encontró que el 25 % de las partículas de un gas están dispersas en una zona de 400 mL. ¿Cuántos mililitros de gas están dispersos en esa zona?
4. Relaciones morfométricas y alometría: funciones potenciales
4.1 Alometría: tamaño y forma en biología
La alometría es el estudio de cómo los cambios en el tamaño de un organismo afecta a sus características, lo que puede involucrar transformaciones morfológicas, así como modificaciones ecológicas, fisiológicas y conductuales. Es muy importante para comprender las relaciones entre distintas características físicas, como la altura y el peso, en organismos animales y vegetales. La alometría también es importante en la investigación ecológica y evolutiva, ayudando a entender los patrones de crecimiento y adaptación de las especies.
Modelo matemático La fórmula básica para representar una relación alométrica es:
$y = ax^b$
donde, y es la variable dependiente (por ejemplo, el peso de un órgano), x es la variable independiente (por ejemplo, el tamaño del individuo), a es una constante que depende del sistema biológico que estamos estudiando, b es el exponente alométrico.
Por ejemplo, supongamos que estamos midiendo el volumen x y la masa y de diferentes especies de mamíferos. Sea la ecuación
$y = 0.1 \cdot x^{3/4}$,
podemos interpretar que, aunque el volumen crece más rápidamente que la masa, la masa no aumenta de manera proporcional al volumen debido a la eficiencia metabólica y estructural de los animales más grandes. Es decir, en esta ecuación, el exponente $\frac{3}{4}$ es el que marca la relación entre la masa y y el volumen x del individuo. Si analizamos esto, vemos que la relación no es directamente proporcional porque el exponente no es 1. Si fuera y = ax, esto significaría que la masa aumenta de manera proporcional al volumen; en otras palabras, si el volumen se duplicara, la masa también se duplicaría. Pero en este caso, como el exponente es menor que 1, la masa aumenta a un ritmo más lento que el volumen. Es decir, si el volumen se duplica, la masa no lo hará en la misma proporción.
Además es importante cuestionarse ¿por qué la masa no aumenta proporcionalmente al volumen?Esto se puede deber a:
• Eficiencia metabólica Reiss plantea que los organismos más grandes pueden tener una mayor proporción de tejido menos activo metabólicamente, por lo que, aunque en términos absolutos un animal grande tenga una tasa metabólica mayor que uno pequeño, su tasa metabólica por unidad de masa es menor (Reiss, p. 7). Esto se debe a que, aunque los animales grandes tienen más células y órganos, el aumento en tamaño no implica que todas las funciones metabólicas (como la digestión, la circulación o el transporte de oxígeno) aumenten al mismo ritmo. La masa no aumenta tan rápidamente como el volumen.
• Estructura A medida que un animal aumenta su tamaño durante su desarrollo, su estructura también cambia. Las proporciones de las diferentes partes de su cuerpo se ajustan para soportar el aumento de tamaño, pero no todos los componentes crecen al mismo ritmo. Por ejemplo, en un individuo los huesos deben ser cada vez más gruesos para sostener el aumento de masa, pero no crecen proporcionalmente al volumen total del cuerpo. Esta adaptación estructural también explica por qué la masa no crece de manera proporcional al volumen en lo que respecta a los huesos.
Thompson plantea que existe un límite definido para la posible magnitud de un animal que vive bajo la acción directa de la gravedad. El elefante, por ejemplo, al observar las dimensiones de los huesos de sus extremidades se pueden ver signos de una tendencia al grosor desproporcionado. Menciona que “a medida que el tamaño de un animal aumenta, sus miembros tienden a volverse más gruesos y cortos, y todo el esqueleto se vuelve más voluminoso y pesado. Los huesos constituyen alrededor del 8% del cuerpo de un ratón, 13 o 14% de un ganso o perro, y 17 o 18% del cuerpo de un hombre.» (Thompson, p. 26-28).
Es importante señalar que estos porcentajes varían dependiendo del medio en el que el animal se desarrolle. Por ejemplo, animales terrestres y marinos presentan diferencias en su composición ósea debido a las distintas condiciones ambientales. En el caso de los patos y las gallinas, las diferencias en sus alas y en cómo crecen son clave para sus capacidades de vuelo. Los patos, por estar adaptados para volar, tienen alas más grandes en relación con su cuerpo, mientras que las gallinas, al no ser voladoras, tienen alas más pequeñas y no están adaptadas para el vuelo, lo que refleja cómo su crecimiento y estructura están influenciados por el entorno en el que viven.
Ahora supongamos que tenemos una planta cuyo tamaño en altura x se relaciona con su tasa de crecimiento medida como el aumento en su peso y. Si esta relación estuviera definida por:
$y = 0.5 \cdot x^{1.2}$,
podríamos predecir que, a medida que la planta crece, su tasa de crecimiento también aumenta, pero a un ritmo ligeramente mayor que su aumento en tamaño. Al tener un exponente mayor que 1, su tasa de crecimiento y aumentará más rápidamente que el tamaño de la planta x. Es decir, cuando la planta crece más en altura, no solo aumentará en tamaño, sino que la cantidad de recursos metabólicos (como nutrientes, agua, luz solar) que puede captar y procesar la planta, también crece a un ritmo mayor. Esto podría deberse a que las plantas más grandes tienen una mayor capacidad para realizar fotosíntesis y, por lo tanto, pueden aumentar su masa a una tasa más alta que su simple crecimiento en tamaño.
Ejemplo Sea un elefante adulto de 3.3 metros de altura y 6 000 kilogramos de masa. Supongamos que queremos modelar la relación entre el peso de la masa (y) y la altura (x) de dicho elefante utilizando un modelo alométrico de la forma: $y = a \cdot x^b$, donde:
y es el peso del elefante en kilogramos,
x es la altura del elefante en metros,
a es una constante específica para esta relación,
b es el exponente alométrico, que refleja cómo varía el peso con respecto a la altura.
Nota importante: el valor del exponente b para especies grandes, como los elefantes, generalmente se obtiene a través de estudios empíricos. En muchos mamíferos grandes, el exponente alométrico b suele estar en el rango de 2.5 a 3. Este valor se ha observado en estudios alométricos realizados por biólogos que modelan la relación entre el tamaño y el peso de diferentes especies de mamíferos. Por ejemplo, según Reiss en sus estudios de alometría en elefantes africanos (Loxodonta africana) encontró que el exponente b se encuentra cerca de 2.7 (Reiss, p. 47).
Usamos los valores de los datos conocidos para encontrar la constante a en la ecuación alométrica. Sabemos que: x = 3.3 m (altura), y = 6000 kg (peso), y suponemos que b = 2.7. Sustituyendo en la ecuación: $y = a \cdot x^b \Rightarrow 6000 = a \cdot (3.3)^{2.7}$. Resolvemos para a: $a = \frac{6000}{38.3} \approx 156.5$.
De manera que la ecuación que describe la relación buscada es: $y = 156.5 \cdot x^{2.7}$.
Podemos decir que este modelo muestra que el peso del elefante africano aumenta a un ritmo mucho más rápido que la altura. Esto es consistente con la idea de que los animales más grandes necesitan estructuras corporales más robustas para sostener su tamaño. La constante a refleja la escala de la relación para esta especie en particular, y el exponente b = 2.7 indica que, por cada unidad de aumento en la altura, el peso aumenta de manera más que proporcional.
Ejemplo Sea una planta de maíz de 2.5 metros de altura y 5 kilogramos de masa. Supongamos que queremos modelar la relación entre el peso de la masa(y) y la altura de la planta (x), utilizando un modelo alométrico de la forma: $y = a \cdot x^b$, donde:
y es el peso de la planta en kilogramos,
x es la altura de la planta en metros,
a es una constante específica para esta relación,
b es el exponente alométrico.
Nota importante: para las plantas, el valor del exponente b generalmente se encuentra en el rango de 1.1 a 1.3. Este valor depende de cómo el crecimiento de la biomasa se ve influenciado por factores como la capacidad de la planta para realizar fotosíntesis, la disponibilidad de recursos y las condiciones ambientales. En estudios de alometría para el maíz, se ha observado que el exponente b está alrededor de 1.2.
Usamos los valores de los datos conocidos para encontrar la constante a. Sabemos que: x = 2.5 m (altura), y = 5 kg (peso), y suponemos que b = 1.2. Sustituyendo en la ecuación: $y = a \cdot x^b \Rightarrow 5 = a \cdot (2.5)^{1.2}$ Ahora resolvemos para a: $a = \frac{5}{3.16} \approx 1.58$.
Por lo que la ecuación que describe la relación que buscamos es: $y = 1.58 \cdot x^{1.2}$.
Podemos observar que este modelo muestra que, a medida que la planta de maíz crece en altura, su peso aumenta a un ritmo mayor. Esto tiene sentido, ya que las plantas más altas tienen más capacidad para captar luz solar, agua y nutrientes, lo que les permite incrementar su masa de manera más rápida a medida que crecen.
Ejercicio Sea una planta de agave de 1.8 metros de altura y 25 kilogramos de masa. Modela la relación entre el peso de la masa(y) y la altura de la planta (x), utilizando un modelo alométrico de la forma: $y = a \cdot x^b$. Considera un exponente alométrico b = 1.2.
4.2 Propiedades de las potencias y los logaritmos
Las potencias y los logaritmos son funciones matemáticas y herramientas importantes para estudios biológicos, especialmente en el análisis de relaciones exponenciales entre variables. Estas relaciones pueden aparecer en modelos de crecimiento, distribución de recursos, y escalas de tamaño en organismos vivos. A través de las propiedades de las potencias y la transformación logarítmica, podemos simplificar la resolución de ecuaciones complejas, además de visualizar relaciones no lineales de manera más clara.
Potencias Las potencias son funciones matemáticas de la forma $x^b$, donde b es un exponente. Estas funciones forman una familia de curvas, cuya forma cambia dependiendo del valor de b. A continuación se puede observar gráficamente esta familia de curvas para algunos valores de b:
Estas propiedades nos permiten simplificar expresiones algebraicas complejas y que resulte más sencillo operar con ellas. Al transformar las potencias, podemos estudiar cómo las variables se afectan entre sí.
Ejercicios
a. $x^2 \cdot x^5$
b. $x^6 \cdot x^3$
c. $\left(x^2\right)^4$
d. $\left(x^5\right)^3$
e. $\frac{x^8}{x^2}$
f. $\frac{x^9}{x^4}$
Logaritmos Los logaritmos son el proceso inverso de la potenciación. Mientras que la potenciación nos permite elevar una base a un exponente, el logaritmo nos permite encontrar el exponente al que debemos elevar una base para obtener un determinado valor. Por ejemplo, el logaritmo en base 10 de 1000 es 3, porque $10^3 = 1000$.
La propiedad básica de los logaritmos es la siguiente:
$\log_b(xy) = \log_b(x) + \log_b(y)$
Esto quiere decir que el logaritmo de un producto es la suma de los logaritmos de los factores.
A continuación se puede observar gráficamente las familias de curvas de las funciones inversas para algunos valores de a:
Propiedades de los logaritmos
Producto: $\log_b(x \cdot y) = \log_b(x) + \log_b(y)$ Ejemplo: Si x = 2 e y = 8, calculamos $\log_2(2 \cdot 8)$: $\log_2(16) = \log_2(2) + \log_2(8)$ Sabemos que $\log_2(16) = 4$,$\log_2(2) = 1$ y $\log_2(8) = 3$, por lo tanto: 4 = 1 + 3.
Cociente:$\log_b\left(\frac{x}{y}\right) = \log_b(x) – \log_b(y)$ Ejemplo: Si x = 8 e y = 2, calculamos $\log_2\left(\frac{8}{2}\right)$: $\log_2(4) = \log_2(8) – \log_2(2)$ Sabemos que $\log_2(4) = 2$, $\log_2(8) = 3$ y $\log_2(2) = 1$, por lo tanto: 2 = 3 – 1.
Potencia: $\log_b(x^n) = n \cdot \log_b(x)$ Ejemplo: Si x = 2 y n = 3, calculamos $\log_2(2^3)$: $\log_2(8) = 3 \cdot \log_2(2)$ Sabemos que $\log_2(8) = 3$ y $\log_2(2) = 1$, por lo tanto: $3 = 3 \cdot 1$.
Cambio de Base: $\log_b(x) = \frac{\log_c(x)}{\log_c(b)}$ Ejemplo: Si x = 8, b = 2 y c = 10, calculamos $\log_2(8)$ utilizando la base 10: $\log_2(8) = \frac{\log_{10}(8)}{\log_{10}(2)}$ Sabemos que $\log_{10}(8) \approx 0.903$ y $\log_{10}(2) \approx 0.301$, por lo tanto: $\log_2(8) = \frac{0.903}{0.301} \approx 3$
Logaritmo de 1: $\log_b(1) = 0 \quad \text{para cualquier base} \, b > 0$ Ejemplo: Si b = 5, entonces: $\log_5(1) = 0$
Transformación logarítmica Si tenemos una ecuación de una función exponencial de la forma $y = ax^b$, podemos aplicar logaritmos de base 10 o natural para obtener una relación lineal:
De esta forma, los datos pueden ser graficados en un sistema de coordenadas log-log, y la pendiente de la recta resultante será igual al valor de b.
Ejemplo Dado un conjunto de datos con las variables de masa corporal y y altura x a lo largo del desarrollo de una especie, al aplicar logaritmos a ambos valores, se podrían graficar estos valores y ver si los datos siguen una línea recta. Si la relación es alométrica, la pendiente de esa línea corresponderá al exponente b.
Sea el siguiente conjunto de datos sobre la masa corporal (kg) y altura (cm) de un ciervo a lo largo de su desarrollo: (50, 3.5), (80, 12), (90, 25), (100, 40), (110, 60), (120, 80).
El primer paso es aplicar el logaritmo en base 10 a ambos valores:
x (altura en cm)
y (masa en kg)
log(x)
log(y)
50
3.5
1.698970004
0.5440680444
80
12
1.903089987
1.079181246
90
25
1.954242509
1.397940009
100
40
2
1.602059991
110
60
2.041392685
1.77815125
120
80
2.079181246
1.903089987
Al graficar los dos conjuntos de datos, obtenemos las gráficas:
Ejemplo Para calcular la pendiente de la recta logarítmica obtenida (continuando con la información del ejemplo anterior) usamos la fórmula de la pendiente $b = \frac{(y_2 – y_1)}{(x_2 – x_1)}$, donde $(x_1, y_1)$ y $(x_2, y_2)$ son dos puntos transformados.
Tomamos un par de puntos (1.698970004, 0.5440680444) y (1.903089987, 1.079181246):
Ejercicio Dada la ecuación $y = 0.5 \cdot x^{2.1}$, realiza su transformación logarítmica.
Ejercicio Dado el siguiente conjunto de puntos (x, y): (1, 2), (2, 8), (4, 32), (8, 128), (16, 512), esboza la curva que representan. Luego realiza su transformación logarítmica y encuentra el lugar geométrico que describen los nuevos datos.
Ejercicio En un estudio sobre la relación entre la masa corporal y la altura de una especie de mamífero terrestre, se ha observado que estas dos variables siguen una relación alométrica. Se te proporcionan los siguientes datos para una muestra de 6 individuos:
Individuo
x (altura en cm)
y (masa en kg)
1
33
2.5
2
51.5
7
3
58
12.5
4
69
18
5
83
24.5
6
92
32
Grafica los puntos y encuentra la curva alométrica.
Transforma los valores de altura x y masa y de cada individuo aplicando logaritmos de base 10 (puedes usar una hoja de cálculo para tener resultados más precisos).
Grafica los puntos transformados en un sistema de coordenadas log-log.
Calcula la pendiente de la recta que pasa por los puntos transformados, que representará el valor del exponente b en la ecuación alométrica (puedes usar la fórmula de la pendiente $b = \frac{(y_2 – y_1)}{(x_2 – x_1)}$.
4.3 Transformación de datos y ajuste de curvas alométricas
Transformación de datos Como se mencionó anteriormente, cuando los datos de un experimento no siguen una relación lineal directa, podemos transformarlos para hacer que sigan una tendencia más fácil de analizar. En biología, esto ocurre comúnmente cuando estamos trabajando con relaciones exponenciales.
Para transformar los datos, se puede aplicar el logaritmo de cada uno de los valores. Este proceso es útil cuando tenemos datos que siguen una ley del tipo $y = ax^b$, ya que al aplicar el logaritmo, transformamos la relación en una forma lineal:
$\log(y) = \log(a) + b \log(x)$
Esta transformación convierte la relación no lineal en una recta, la cual podemos analizar utilizando métodos estadísticos.
Ajuste de curvas alométricas El ajuste de curvas implica encontrar el valor de a y b que mejor describen la relación entre las variables y y x. Para hacer esto, se puede usar el método de mínimos cuadrados que es una técnica utilizada para encontrar la recta que mejor se ajusta a un conjunto de datos minimizando la suma de las diferencias cuadradas entre los valores observados y los valores predichos por la recta. La recta se describe con la ecuación $Y=mX+c$, donde m es la pendiente de la recta y c es la intersección o el valor de Y cuando X = 0.
La intención del método es encontrar la recta que minimice la suma de las diferencias cuadradas entre los valores observados (los puntos reales en el gráfico) y los valores predichos por la recta. No podemos esperar que todos los puntos encajen en la recta, sin embargo, se busca encontrar la mejor aproximación posible.
Para encontrar esta recta debemos considerar la siguiente fórmula para encontrar la pendiente m:
$x_i$ y $y_i$ son los valores individuales de los datos transformados de x e y,
$\bar{x}$ y $\bar{y}$ son las medias de $\log(x)$ y $\log(y)$, respectivamente.
La fórmula propuesta es una expresión estándar derivada de los principios del ajuste de curvas mediante el método de mínimos cuadrados, y nos da el valor de la pendiente de la recta que mejor aproxima los datos transformados.
Una vez que hemos calculado la pendiente m, podemos calcular la intersección c, que es el valor de $\log(y)$ cuando $\log(x) = 0$. Para calcular c, utilizamos la siguiente fórmula:
$c = \frac{\sum y_i – m \cdot \sum x_i}{n},$
donde:
$\sum y_i$ es la suma de los valores de $\log(y)$,
$\sum x_i$ es la suma de los valores de$\log(x)$,
m es la pendiente que hemos calculado previamente,
n es el número total de puntos de datos.
Ésta fórmula proviene de la ecuación general de la recta $Y = mX + c$, evaluada en los puntos medios de los valores de X e Y. Esta fórmula garantiza que la recta pase por el promedio de los puntos transformados.
Ejemplo Supongamos que se tiene un conjunto de datos de peso y y tamaño x de diferentes individuos que cumple con una relación alométrica. Los datos obtenidos son:
(x, y) = (2, 10), (4, 16), (8, 40), (16, 100)
Queremos encontrar la ecuación $y = a x^b$ utilizando el método de mínimos cuadrados.
• Paso 1: Transformación logarítmica de los datos Como estamos trabajando con una relación alométrica del tipo $y = ax^b$, aplicamos logaritmos en base 10 a ambos valores de x e y: $\log(x) = \{0.3010, 0.6021, 0.9031, 1.2041\}$ y $\log(y) = \{1, 1.2041, 1.6021, 2\}.$
Luego, los puntos transformados son: $(\log(x), \log(y)) = (0.3010, 1), (0.6021, 1.2041), (0.9031, 1.6021), (1.2041, 2)$
• Paso 2: Ajuste de la recta usando mínimos cuadrados Ahora que tenemos los puntos transformados, ajustamos una recta $Y = mX + c$, donde $Y = \log(y) y X = \log(x)$. Consideramos la fórmula para calcular la pendiente m:
Sustituimos los valores en la fórmula de c: $c = \frac{5.8062 – (1.13)(3.0103)}{4} = \frac{5.8062 – 3.4022}{4} = \frac{2.4040}{4} = 0.6010$
•Paso 3: Definición de la ecuación de la recta La ecuación de la recta transformada es: $\log(y) = 1.13 \log(x) + 0.6010$
Para obtener la ecuación original $y = a \cdot x^b$ a partir de los datos obtenidos, sabemos que b = m = 1.13 y $\log(a) = c = 0.6010$. Por lo tanto, $a = 10^{0.6010} \approx 4.0$. Así que la ecuación alométrica que buscamos es:
$y = 4 \cdot x^{1.13}$.
Ejercicio Supongamos que estamos estudiando la relación entre la altura x (cm) y el peso y (kg) de pumas macho en una zona montañosa de México. Los datos obtenidos para cuatro individuos son los siguientes: $(x, y) = (220, 60), (230, 62), (225, 64), (210, 58)$ Encuentra la ecuación $y = a \cdot x^b$ que mejor describa la relación alométrica utilizando el método de mínimos cuadrados.
4.4 Otras funciones potenciales en biología: el metabolismo y las leyes de Kleiber y Rubner
Ley de Kleiber La ley de Kleiber establece que la tasa metabólica M (generalmente en calorías o kilocalorías por día) de los organismos es proporcional a su masa corporal (en kilogramos) W elevada a la ¾. Esta ley se puede expresar como:
$M = a \cdot W^{3/4}$,
donde a es una constante de proporcionalidad que se determina experimentalmente y varía entre diferentes grupos de organismos (mamíferos, aves, reptiles, etc.). Esta constante refleja la eficiencia metabólica del organismo y la forma específica en que su cuerpo utiliza la energía en función con su masa. Por ejemplo, en mamíferos, la constante a suele tener un valor cercano a 70, aunque puede ajustarse para cada especie dependiendo de su metabolismo y características fisiológicas.
Concepto clave: Aunque los animales más grandes tienen una mayor tasa metabólica, esta no es proporcional al tamaño de su masa debido a factores como la eficiencia del metabolismo y la distribución de la energía.
Ejemplo Supongamos que un animal tiene una masa de 500 kg y una constante a = 70, entonces usando la ley de Kleiber, podemos calcular su tasa metabólica:
Este cálculo nos indica que el animal consume aproximadamente 7401.59 kcal por día, que es su tasa metabólica según la ley de Kleiber.
Ley de Rubner La ley de Rubner establece que la tasa metabólica M de un organismo es proporcional a su superficie corporal A, con la fórmula:
$M = k \cdot A^{2/3}$,
donde k es una constante que se determina experimentalmente y depende de la forma del animal y de cómo se distribuye su masa en relación con su superficie. Cada especie tiene un valor único de k basado en su morfología y distribución corporal; los animales más grandes tienen un valor más pequeño de k, mientras que los animales más pequeños, tendrán un valor de k más grande, ya que su forma está más adaptada a perder calor rápidamente. Los valores de k usualmente oscilan entre 60 y 80 para mamíferos en general.
Concepto clave: En organismos pequeños, la superficie corporal es crucial para determinar la tasa metabólica debido a su papel en el intercambio de calor y energía con el ambiente. A medida que los animales son más pequeños, su área superficial en relación con el volumen es mayor, lo que favorece la pérdida de calor.
Ejemplo Vamos a comparar cómo cada ley describe la tasa metabólica de dos animales de tamaños muy diferentes: un ratón y un elefante.
Ley de Kleiber La ley de Kleiber describe cómo la tasa metabólica está relacionada con la masa corporal.
Para ello, utilizamos la fórmula $M = a \cdot W^{3/4}$ con los siguientes datos respectivamente:
Masa del ratón: $W_{\text{ratón}} = 0.03 \, \text{kg}$
Masa del elefante: $W_{\text{elefante}} = 5000 \, \text{kg}$
Ley de Rubner La ley de Rubner, por otro lado, describe la tasa metabólica en función de la superficie corporal A. Usamos la fórmula:
$M = k \cdot A^{2/3}$
supongamos $k_{\text{ratón}} = 70$ y $k_{\text{elefante}} = 60$.
Para usar esta ley, necesitamos calcular el área superficial de cada animal. Aproximamos la superficie corporal A de un organismo utilizando la fórmula:
$A = k \cdot W^{2/3}$
supongamos $k_{\text{ratón}} = 10$ y $k_{\text{elefante}} = 5$. Calculamos el área superficial de cada animal y a continuación sus tasas metabólicas
Observaciones: • La ley de Kleiber se basa en la relación entre la masa corporal de un organismo y su tasa metabólica, y muestra que los organismos más grandes tienen una tasa metabólica mayor, pero no proporcional a su masa. Los resultados muestran que el elefante, con una masa mucho mayor, tiene una tasa metabólica considerablemente mayor (aproximadamente 47568 kcal/día) en comparación con el ratón (aproximadamente 5.05 kcal/día). Esto es consistente con la hipótesis de que los animales grandes requieren más energía, pero la relación no es directamente proporcional a su masa.
• La ley de Rubner se enfoca en la superficie corporal, lo que es un factor importante en el intercambio de calor y la eficiencia metabólica de los animales, sobre todo en los más pequeños, que tienden a tener una tasa metabólica relativamente más alta en relación con su masa, ya que tienen más superficie en proporción a su volumen. En este caso, el ratón tiene una tasa metabólica más alta (aproximadamente 68.59 kcal/día) que el elefante (aproximadamente 7728.87 kcal/día), lo que refleja que los animales pequeños tienen una tasa metabólica más alta debido a la mayor superficie corporal relativa.
Podemos concluir que: La ley de Kleiber es más adecuada para animales grandes, donde la masa corporal es el factor dominante que determina el metabolismo; y la ley de Rubner es más adecuada para animales pequeños, donde la superficie corporal juega un papel crucial en la tasa metabólica debido a la mayor tasa de pérdida de calor y eficiencia energética.
Referencias bibliográficas
Thompson, D’ A. W. 1992 On growth and form: the complete revised edition. Dover, Nueva York. Reiss, Michael J. 1989. The Allometry of Growth and Reproduction. Cambridge University Press, Cambridge.
Evaluación
1. Elige la respuesta correcta
a. La alometría describe únicamente cómo cambia el peso de un organismo a medida que crece. A) Verdadero B) Falso
b. ¿Cuál de las siguientes ecuaciones representa una relación alométrica? A) $y = a + bx$ B) $y = a \cdot x^b$ C) $y = \log(x + a)$ D) $y = a \cdot \exp(bx)$
c. ¿Qué representa el exponente b en una ecuación alométrica? A) Una constante relacionada con la unidad de medida B) La tasa metabólica C) El tipo de relación entre tamaño y forma D) La pendiente de una recta horizontal
d. ¿Cuál es la ventaja de aplicar logaritmos a una relación $y = ax^b$? A) Hacerla no diferenciable B) Eliminar la constante a C) Convertirla en una relación lineal D) Aumentar la tasa de crecimiento
e. Supón que una especie vegetal tiene una relación alométrica dada por $y = 2 \cdot x^{1.5}$, donde y es la masa en kg y x la altura en metros. • ¿Cuál es la masa cuando la planta mide 2 metros? • ¿Qué tipo de crecimiento indica el exponente 1.5?
f. Considera la ecuación alométrica $y = 0.8 \cdot x^{2.1}$. Realiza su transformación logarítmica y escribe la forma lineal resultante.
g. A partir de los siguientes datos:
x (cm)
y (kg)
30
3
60
10
• Aplica logaritmo base 10 a los valores. • Calcula la pendiente que define el valor del exponente alométrico b.
2. Resuelve
a. Se investigan dos especies vegetales: una de hojas grandes (palma) y otra de hojas pequeñas o menos extensas (agave). Ambas tienen masas similares, pero distintas relaciones entre su área superficial y volumen. Se quiere analizar cómo varía su crecimiento metabólico usando un modelo de tipo alométrico y observar qué tipo de planta se ajusta mejor a qué tipo de modelo.
Datos (altura en m, masa en kg): • Palma: (1.5, 30), (2, 60), (2.5, 95), (3, 140) • Agave: (0.5, 8), (0.8, 20), (1, 30), (1.3, 45)
i. Ajusta un modelo alométrico $y = a \cdot x^b$ a cada conjunto de datos. ii. Realiza la transformación logarítmica para ambos y calcula el valor del exponente b. iii. Representa gráficamente las relaciones en escala log-log. iv. Compara la forma de crecimiento de ambas plantas e interpreta el papel que podría jugar la morfología de sus hojas. v. Redacta una conclusión: ¿cuál crece más rápidamente en masa en relación a su tamaño? ¿Por qué podría ser útil este tipo de análisis en agronomía o ecología?
b. Se han registrado datos de masa corporal W en kilogramos para un ratón y un elefante en distintas etapas de su desarrollo. Utiliza la Ley de Kleiber y la Ley de Rubner para calcular la tasa metabólica M de ambos organismos.
Datos: • Para el ratón (masa en kg): 0.01, 0.02, 0.04, 0.08 • Para el elefante (masa en kg): 500, 1000, 3000, 6000 • Constantes: ○ $a_{\text{ratón}} = 70$, $a_{\text{elefante}} = 80$ ○ $k_{\text{ratón}} = 75$, $k_{\text{elefante}} = 65$ ○ $c_{\text{ratón}} = 10$, $c_{\text{elefante}} = 5$
i. Calcula la tasa metabólica de cada organismo con ambas leyes para cada masa. ii. Realiza dos gráficas por separado para cada organismo (una con la ley de Kleiber y otra con la de Rubner). iii. Compara los patrones de crecimiento en las gráficas. iv. Redacta una conclusión sobre cuál ley describe mejor la tasa metabólica de cada organismo y por qué.
Entonces el $det \, {f \, }’ (\vec{a}) = e^{2x_0} \, > \, 0$ para todo $(x_0, y_0)$.
Por lo que, $f$ cumple las hipótesis del teorema de la función inversa, $det \, {f \, }’ (\vec{a}) \neq 0$.
Existen abiertos $\mathcal{U} \subseteq \mathbb{R}^2$ y $\mathcal{V} \subseteq \mathbb{R}^2$ tales que $\vec{a} \in \mathcal{U}$, $f(\vec{a}) \in \mathcal{V}$.
Entonces $f \Big|_{\mathcal{U}} : \mathcal{U} \rightarrow \mathcal{V}$ es invertible, existe la inversa localmente, y la inversa es derivable $\big( {f\, }^{-1}\big)’ (b) = \Big( {f\, }’ \big( {f\, }^{-1} (b) \big) \Big)^{-1}$.
La condición de que $det \, {f\, }’ (\vec{a}) \neq 0 $ garantiza que la diferencial de $f$ en $\vec{a}$ sea un transformación lineal invertible.
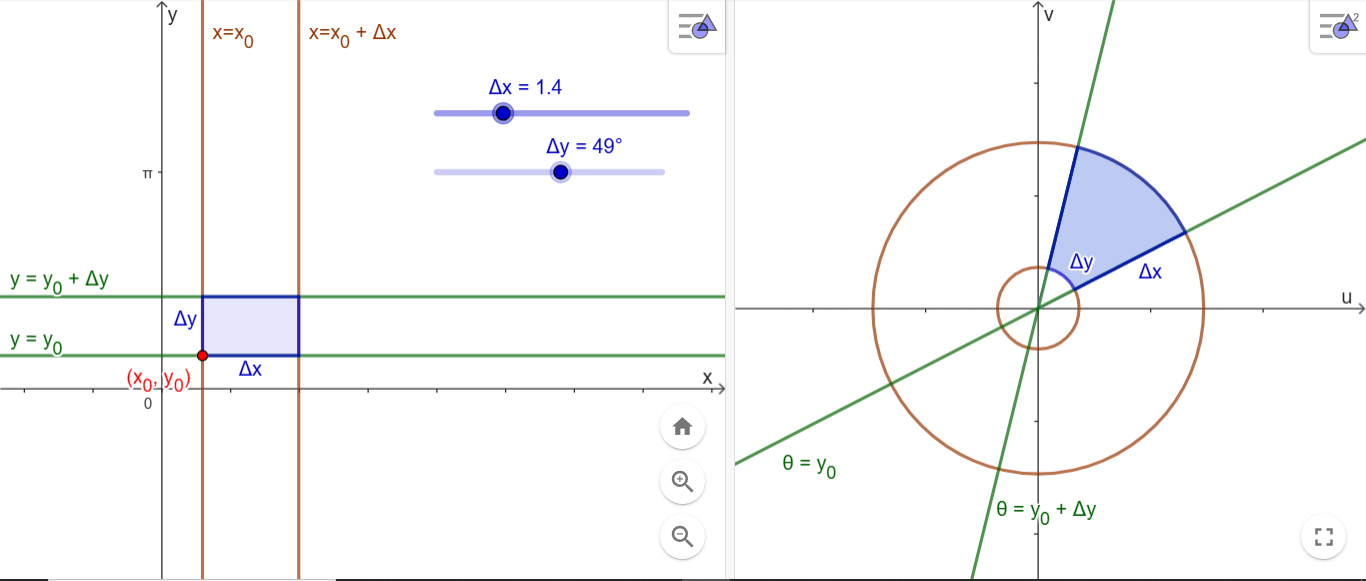
Entonces, ¿cuál es la imagen de una recta horizontal $y = y_0$ bajo $f$?
$f (x, y_0) = e^x (\cos {y_0}, \sin {y_0})$ con $x$ variable y $ y = y_0$ fija.
Entonces $(\cos {y_0}, \sin {y_0})$ es un vector constante.
Por el contrario, $e^x$ es variable, y toma valores en el intervalo $(0, \infty)$.
Entonces $f(x,y_0)$ recorre la semirrecta que emana del origen en la dirección del vector constante $(cos y_0, sen y_0)$.
Si $y_0 = \pi$ entonces, $(\cos y_0, \sin y_0) = (- \, 1, 0)$. La imagen de esta recta es la parte negativa del eje $x$.
Si $y_0 = \, – \, \pi$ entonces, $(\cos y_0, \sin y_0) = (- \, 1, 0)$. Esto nos muestra que $f$ no es inyectiva, por lo tanto no tiene inversa global aunque tenga inversa local.
Ahora, ¿cuál es la imagen de una recta vertical $x = x_0$?
Es decir, $x = x_0$ fija, y $y$ variable. Entonces
$f (x_0, y) = e^{x_0} ( \cos y, \sin y)$, donde $e^{x_0}$ es constante, y $( \cos y, \sin y)$ es un vector unitario variable. La imagen de una recta vertical $x=x_0$ es una circunferencia de radio $e^{x_0}$.
En la siguiente animación puedes modificar los valores de $x_0$ y $y_0$ para observar la imagen respectiva de las rectas horizontales y verticales que se analizaron anteriormente.
$d f_a : \mathbb{R}^2 \rightarrow \mathbb{R}^2$ es tal que los vectores tangentes a curvas que pasan por $a$, $\longrightarrow$ vectores tangentes a curvas que pasan por $f (a)$
$f (x, y) = \big( u (x, y), v (x, y) \big) = \Big( e^x \cos y, e^x \sin y \Big)$ cumple las hipótesis del teorema de la función inversa en todos los puntos $a = (x_0, y_0) \in \mathbb{R}^2$.
El teorema nos garantiza que existe una inversa local, es decir, una vecindad $\mathcal{U}$ que contiene a $a$ y una vecindad $\mathcal{V}$ que contiene a $f (a)$ tal que $f \big|_{\mathcal{U}} : \mathcal{U} \rightarrow \mathcal{V}$ es biyectiva e invertible tiene inversa local $f^{-1} : \mathcal{V} \rightarrow \mathcal{U}$.
Tomemos $a = (0, 0)$ y $f (a) = (1, 0)$.
Para describir con detalle la inversa local de la que nos habla el teorema necesitamos saber cuales son los abiertos $\mathcal{U}$ y $\mathcal{V}$, y la regla de correspondencia $x = p (u, v)$ y $y = q (u, v)$.
$u = e^x \cos y$
$v = e^x \sin y$
Entonces
$u^2 + v^2 = e^{2x} {\cos}^2 y + e^{2x} {\sin}^2 y = e^{2x}$
$ln (u^2 + v^2) = ln (e^{2x}) = 2x$
$\textcolor{blue}{x = \dfrac{ln (u^2 + v^2)}{2}}$ siempre que $\textcolor{blue}{(u, v) \neq (0, 0)}$