Introducción
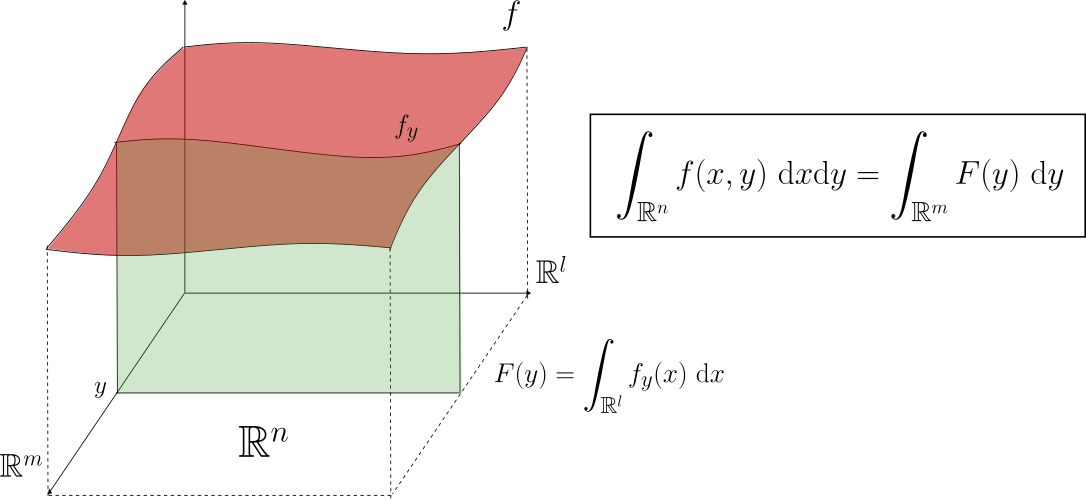
Anteriormente, enunciamos el Teorema de Fubini y analizamos algunas de sus consecuencias directas. En esta entrada estudiaremos cómo el teorema de Fubini nos puede ayudar a calcular integrales sobre regiones más complicadas.
Productos de conjuntos medibles
Antes de empezar, veamos un resultado bastante intuitivo pero no trivial que será útil para justificar nuestros desarrollos más adelante.
Proposición. Sean $A\subseteq \mathbb{R}^l$ y $B\subseteq \mathbb{R}^m$. Consideremos $A\times B\subseteq \mathbb{R}^l\times \mathbb{R}^m=\mathbb{R}^n$. Si $A\in \mathcal{L}_n$ y $B\in \mathcal{L}_m$, entonces $$A\times B \in \mathcal{L}_n.$$ Y además $$\lambda(A\times B)=\lambda(A)\lambda(B).$$
Demostración. El teorema es inmediato cuando $A$ y $B$ son ambos abiertos (o ambos cerrados), pues en este caso $A\times B$ es abierto (o cerrado) y en automático medible. Más aún, por Fubini:
\begin{align*}
\lambda(A\times B) &= \int_{\mathbb{R}^n}\chi_{A\times B} (x,y) \ \mathrm{d}x \mathrm{d}y \\
&= \int_{\mathbb{R}^n}\chi_A (x) \cdot \chi_B(y) \ \mathrm{d}x \mathrm{d}y \\
&= \int_{\mathbb{R}^m}\left (\int_{\mathbb{R}^l}\chi_A (x)\cdot \chi_B(y) \ \mathrm{d}x \right) \mathrm{d}y \\
&= \int_{\mathbb{R}^m} \chi_B(y) \left (\int_{\mathbb{R}^l}\chi_A (x) \ \mathrm{d}x \right) \mathrm{d}y \\
&= \left( \int_{\mathbb{R}^l}\chi_A (x) \ \mathrm{d}x \right) \left( \int_{\mathbb{R}^m} \chi_B(y) \ \mathrm{d}x\right) \\
&= \lambda(A)\lambda(B).
\end{align*}
De hecho, este último argumento es válido siempre que $A\times B\in \mathcal{L}_n$, así que sólo necesitamos probar que $A\times B$ es medible.
Más aún, basta probar el caso en el que $A$ y $B$ son medibles y de medida finita, pues cualesquiera $A’\in \mathcal{L}_l$ y $B’\in \mathcal{L}_m$ se pueden escribir como
$$A’=\bigcup_{k=1}^{\infty} A_k; \ \ \ \ \ \ \ \ \ B’=\bigcup_{k=1}^{\infty} B_k;$$ Donde los $A_k$ y $B_k$ son conjuntos medibles de medida finita (en $\mathbb{R}^l$ y $\mathbb{R}^m$ respectivamente). Y $$A’\times B’ = \bigcup_{j,k=1}^{\infty} A_k\times B_k.$$
Supongamos entonces que $A$ y $B$ son de medida finita. Por el teorema de caracterización de conjuntos medibles, podemos encontrar subconjuntos $F_1\subseteq \mathbb{R}^l$, $F_2\subseteq \mathbb{R}^m$ cerrados y $G_1\subseteq \mathbb{R}^l$, $G_2\subseteq \mathbb{R}^m$ abiertos tales que:
$$F_1\subseteq A \subseteq G_1,$$ $$F_2\subseteq B \subseteq G_2,$$
Y: $$\lambda(G_1\setminus F_1)<\varepsilon,$$ $$\lambda(G_2\setminus F_2)<\varepsilon.$$
De manera que $F_1\times F_2$ es cerrado (en $\mathbb{R}^n$) y $G_1\times G_2$ es abierto (en $\mathbb{R}^n$), con $$F_1\times F_2 \subseteq A\times B \subseteq G_1\times G_2.$$
Ahora, notemos que
\begin{align*}
(G_1\times G_2)\setminus (F_1\times F_2) &= [(G_1\setminus F_1)\times G_2]\cup [F_1\times(G_2\setminus F_2)] \\
&\subseteq [(G_1\setminus F_1)\times G_2]\cup [G_1\times (G_2\setminus F_2)].
\end{align*}
Notemos que éste último conjunto es unión de productos de abiertos. De modo que podemoes estimar:
\begin{align*}
\lambda((G_1\times G_2)\setminus (F_1\times F_2)) &\leq \lambda([(G_1\setminus F_1)\times G_2]\cup [G_1\times (G_2\setminus F_2)]) \\
&\leq \lambda([(G_1\setminus F_1)\times G_2]) + \lambda( [G_1\times (G_2\setminus F_2)]) \\
&\leq \varepsilon \lambda(G_2)+\lambda(G_1)\varepsilon \\
&\leq \varepsilon( \lambda(B)+\varepsilon )+\varepsilon(\lambda(A)+\epsilon) \\
&= \varepsilon(\lambda(A)+\lambda(B)) +2\varepsilon ^2.
\end{align*}
En resúmen, podemos encontrar $F’=F_1\times F_2$ cerrado y $G’=G_1\times G_2$ abierto tales que $$F’\subseteq A\times B \subseteq G’$$ Y $$\lambda(G’\setminus F’)$$ Sea tan pequeño como queramos. Esto garantiza que $A\times B$ es medible (teorema de caracterización de conjuntos medibles).
$\square$
Teorema de Fubini para productos de conjuntos
Con el resultado anterior en mente, es fácil establecer una versión del teorema de Fubini para productos de conjuntos.
Teorema (Fubini para productos de conjuntos). Sean $A\in \mathcal{L}_l$ y $B\in \mathcal{L}_m$ conjuntos medibles en $\mathbb{R}^l$ y $\mathbb{R}^m$ respectivamente. Sea $f:A\times B\to [-\infty,\infty]$ una función medible que satisface cualquiera de las hipótesis del teorema de Fubini ($f\geq 0$ o $f\in L^1(A\times B)$). Entonces: $$\int_{A\times B}f(x,y) \ \mathrm{d}x\mathrm{d}y=\int_B \left( \int_A f(x,y) \ \mathrm{d}x \right) \mathrm{d}y=\int_A \left( \int_B f(x,y) \ \mathrm{d}y \right) \mathrm{d}x.$$
Demostración. Por simplicidad, probaremos solamente la primera igualdad. La segunda es completamente análoga.
Por la proposición anterior, $A\times B\in \mathcal{L}_n$ es un conjunto medible, por lo que $f\chi_{A\times B}$ es una función medible. Como $f\chi_{A\times B}\geq 0$ si $f\geq 0$ o bien $|f\chi_{A\times B}|\in L^1(\mathbb{R}^n)$ si $f\in L^1(A\times B)$, concluimos que $f\chi_{A\times B}$ satisface las hipótesis del teorema de Fubini. Luego:
\begin{align*}
\int_{A\times B}f(x,y) \ \mathrm{d}x\mathrm{d}y &= \int_{\mathbb{R}^n}f(x,y)\chi_{A\times B}(x,y) \ \mathrm{d}x \mathrm{d}y \\
&= \int_{\mathbb{R}^m} \left( \int_{\mathbb{R}^l}f(x,y)\chi_A(x)\chi_B(y) \ \mathrm{d}x \right)\mathrm{d}y \\
&=\int_{\mathbb{R}^m} \chi_B(y) \left( \int_{\mathbb{R}^l}f(x,y)\chi_A(x) \ \mathrm{d}x \right)\mathrm{d}y \\
&= \int_B \left( \int_{A}f(x,y) \ \mathrm{d}x \right)\mathrm{d}y.
\end{align*}
$\square$
Integración sobre subconjuntos
El Teorema de Fubini resulta muy útil para calcular integrales sobre regiones complejas, especialmente cuando estas pueden expresarse como productos de conjuntos o están delimitadas por funciones. Veamos algunos ejemplos sencillos.
Ejercicio. Calcular $$\int_{[0,1]\times [1,2]}x-2y \ \mathrm{d}x\mathrm{d}y.$$
Solución. Antes de aplicar el teorema de Fubini, hay que asegurarnos que la función $(x,y)\to x-2y$ es $L^1([0,1]\times [1,2])$. En este caso es sencillo:
$$|x-2y|\leq |x|+2|y|\leq (1)+2(2)\leq 5 \ \ \ \ \forall (x,y)\in [0,1]\times[1,2].$$
$$\implies \int_{[0,1]\times[1,2]}|x-2y| \ \mathrm{d}x\mathrm{d}y\leq 5\int_{[0,1]\times[1,2]}1 \ \mathrm{d}x\mathrm{d}y=5\lambda([0,1]\times[1,2])=5<\infty.$$
Así, $f\in L^1([0,1]\times [1,2])$. Entonces, aplicando el teorema de Fubini (para productos de conjuntos):
\begin{align*}
\int_{[0,1]\times [1,2]} x-2y \ \mathrm{d}x\mathrm{d}y &= \int_1^2\left( \int_0^1 x-2y \ \mathrm{d}x \right) \mathrm{d}y \\ &= \int_1^2 \left( \left[ \frac{x^2}{2}\right]_{x=0}^{x=1}-2y(1-0) \right)\mathrm{d}y \\
&= \int_1^2 \left( \frac{1}{2}-2y \right)\mathrm{d}y \\
&= \frac{1}{2}(2-1)-2\left[ \frac{y^2}{2} \right]_{y=1}^{y=2} \\
&= \frac{1}{2}-2(\frac{3}{2}) \\
&= -\frac{5}{2}.
\end{align*}
$\triangle$
Ejercicio. Sea $D=\{ (x,y)\in \mathbb{R}^2 \ | \ 0\leq y \leq x \leq 2\}$. Calcular $$\int_D \frac{y}{1+x^2} \ \mathrm{d}x\mathrm{d}y.$$
Solución. $D$ es medible al ser un conjunto compacto y $f$ es medible al ser una función continua. Por lo anterior, se sigue también que $f$ es acotada sobre $D$, digamos $\sup_D |f|\leq M$. Luego $$\int_D |f| \ \mathrm{d}\lambda\leq M\cdot \lambda(D)<\infty. $$ Concluimos que $f\in L^1(D)$. Aplicando el teorema de Fubini: $$\int_D \frac{y}{1+x^2} \ \mathrm{d}x\mathrm{d}y=\int \left( \int \frac{y}{1+x^2} \cdot \chi_D(x,y) \ \mathrm{d}y \right) \mathrm{d}x. $$
Notemos que $\chi_D(x)=\chi_{[0,2]}(x)\chi_{\{0\leq y\leq x \}}(y)$, así que lo anterior se puede escribir como $$\int \left( \int \frac{y}{1+x^2} \cdot \chi_{[0,2]}(x)\chi_{\{0\leq y\leq x \}}(y) \ \mathrm{d}y \right) \mathrm{d}x=\int \chi_{[0,2]}(x) \left( \int \frac{y}{1+x^2} \cdot\chi_{\{0\leq y\leq x \}}(y) \ \mathrm{d}y \right) \mathrm{d}x$$ $$=\int_0^2\left(\int_0^x \frac{y}{1+x^2} \ \mathrm{d}y \right) \mathrm{d}x.$$
La integral interior es: $$\int_0^x \frac{y}{1+x^2} \ \mathrm{d}y=\frac{1}{1+x^2}\int_0^x y \ \mathrm{d}y=\frac{1}{1+x^2}\left[\frac{y^2}{2} \right]_{y=0}^{y=x}=\frac{x^2}{2(1+x^2)}.$$
Por lo que la integral exterior resulta: $$\int_0^2 \frac{x^2}{2(1+x^2)} \ \mathrm{d}x=\frac{1}{2}\int_0^2\left( 1-\frac{1}{1+x^2} \right) \ \mathrm{d}x=\frac{1}{2}\left[ x-\arctan (x) \right]_{x=0}^{x=2}=\frac{1}{2}(2-\arctan(2)).$$
$\triangle$
Más adelante…
Hemos enunciado el Teorema de Fubini junto con algunas de sus consecuencias.
En la siguiente entrada veremos un par de ejercicios resueltos para ver algunas aplicaciones del teorema de Fubini.
Tarea moral
- Sean $f:\mathbb{R}^l \to [-\infty,\infty]$ y $g:\mathbb{R}^m\to [-\infty,\infty]$ funciones medibles. Prueba que la función $h:\mathbb{R}^l\times \mathbb{R}^m\to [-\infty,\infty]$ dada por $h(x,y)=f(x)g(y)$ es una función medible. [SUGERENCIA: Basta probar por separado que $h_1(x,y)=f(x)$ y $h_2(x,y)= g(y)$ son funciones medibles. ¿Quién es $h_1^{-1}([-\infty,t])$ y $h_2^{-1}([-\infty,t])$?].
- Sea $E\in \mathcal{L}_n$ y $f: E \to [0,\infty]$ una función medible y no negativa sobre $E$. Considera la región bajo la gráfica de $f$: $G_f=\{(x,s)\in \mathbb{R}^{n+1} \ | \ 0\leq s \leq f(x) \}$.
- Demuestra que $G_f$ es un conjunto medible y $$\lambda(G_f)=\int_{E}f(x) \ \mathrm{d}x.$$ [SUGERENCIA: Prueba primero el caso en el que $f=\chi_A$ es una función característica. Deduce el resultado para funciones simples y finalmente para funciones no negativas en general].
- Sea $G_f$ como en el ejercicio anterior. Si $g:G_f \to [-\infty, \infty]$ es $\geq 0$ ó $L^1$, demuestra que $$\int_{G_f} g \ \mathrm{d}\lambda = \int_E \left( \int_0^{f(x)}g(x,s) \ \mathrm{d}s \right) \mathrm{d}x.$$
- Sea $A= \{(x,y)\in [0,1]\times [0,1] \ | \ x\leq y^2 \}$. Calcula $\lambda(A)$.
- Sea $A$ como en el ejercicio anterior. Calcula $$\int_A (x^2+y) \ \mathrm{d}x\mathrm{d}y.$$
- Sea $f(x,y)=\frac{x^2-y^2}{(x^2+y^2)^2}$ sobre $(0,1)\times (0,1)$. Verifica que $$\int_0^1\left( \int_0^1 f(x,y) \ \mathrm{d}x \right) \mathrm{d}y\neq \int_0^1\left( \int_0^1 f(x,y) \ \mathrm{d}y \right) \mathrm{d}x .$$ ¿Porqué esto no contradice el teorema de Fubini?