En está sección estudiaremos el concepto matemático que define los puntos infinitamente cercanos a un conjunto.
Sea A un subconjunto arbitrario de $\mathbb{R}^{n}$. Se dice que $\overline{x}\in \mathbb{R^{n}}$ es un $\textit{punto de acumulación}$ de $A$, si toda bola abierta con centro en $\overline{x}$ contiene un punto de $A$ distinto de $\overline{x}$ es decir $$\forall r>0 \quad \left(B(\overline{x},r)-{\overline{x}}\right)\bigcap A\neq \emptyset$$ Al conjunto de puntos de acumulación de $A$ se le denomina el conjunto derivado de $A$ y se le denota $A^{a}$
Lema 1.-$\bar{x}\in\mathbb{R}^n$ es punto de acumulación de $A$ si y solamente si $\bar{x}\in \overline{A-{\bar{x}}}$
Demostración. Si $\bar{x}$ es un punto de acumulación de A entonces \quad $\forall \, r > 0$ \quad $B(\bar{x},r)-{\bar{x}}\cap A \neq \varnothing$ esta expresión es equivalente a $$B(\bar{x},r)\cap A -{\bar{x}}\neq \varnothing$$ por lo que $$B(\bar{x},r) \cap {\bar{x}}^c\cap A = [B(\bar{x},r) \cap {\bar{x}}^c]\cap A= B(\bar{x},r)\cap A -{\bar{x}}\neq \varnothing$$ pero esto significa que $\bar{x}$ es un punto de adherencia de $A -{\bar{x}}$ $\therefore$ $\bar{x}\in \overline{A-{\bar{x}}}$ $\square$
Ejercicio. Pruebe que $A’\subset \overline{A}$
Demostración. Sea $x\in~A’$ se tiene entonces $$x\in~A’~\Rightarrow~x\in \overline{A-{\bar{x}}}~\underbrace{\Rightarrow}_{ \overline{A-{\bar{x}}}\subset~\overline{A}}~x\in \overline{A}$$ por lo tanto $A’\subset \overline{A}$
Ejercicio. Pruebe que $A\subset B~\Rightarrow~A’\subset~B’$
Demostración. Sea $x\in~A’$ se tiene entonces $$x\in~A’~\Rightarrow~x\in \overline{A-{x}}~\underbrace{\Rightarrow}_{ \overline{A-{x}}\subset~\overline{B-{x}}}~x\in \overline{B-{x}}~\Rightarrow~x\in~B’$$ por lo tanto $A’\subset B’$ $\square$
Proposición 1.-Si $\bar{x}\in\mathbb{R}^n$ es un punto de acumulación de $A$, entonces toda bola abierta $B(\bar{x},r)$ contiene una infinidad de puntos de $A$.
Demostración. Sea $B(\bar{x},r)$ una bola abierta arbitraria con centro $\bar{x}$, supongase que esta bola tuviese solamente un número finito de puntos de $A$, digamos $\bar{x}_1,\ldots,\bar{x}_k$ cada uno distinto de $\bar{x}$ elijamos $r_0=\min{d(\bar{x},\bar{x}_1),\ldots,d(\bar{x},\bar{x}_k)}$ $\therefore$ $d(\bar{x},\bar{x}_i)\leq r$. Consideremos ahora la bola abierta $B(\bar{x},r_0)$. Es claro que $B(\bar{x},r_0) \subset B(\bar{x},r)$ y de la desigualdad se sigue que $B(\bar{x},r_0)$ no contiene puntos de $A$ distintos de $\bar{x}$ pues todo punto de $A$ que estubiese en $B(\bar{x},r_0)$ también sería elemento de $B(\bar{x},r)$ lo cual no es posible ya que $\bar{x}_1,\ldots,\bar{x}_k$ son los únicos elementos de $A$ que están en $B(\bar{x},r)$. Entonces la bola abierta $B(\bar{x},r_0)$ no tiene puntos de $A$ diferentes de $\bar{x}$, esto contradice la hipotesis de que $\bar{x}$ es punto de acumulación. $\square$
Teorema 1.- Un conjunto $A$ es cerrado si y solo si contiene a todos sus puntos de acumulación.
Demostración. Sea $\bar{x}$ un punto de acumulación de $A$. si $\bar{x} \not\in A $, el conjunto abieto $A^{c}$ es una vecindad de $\bar{x}$, que debe contener cuando menos un punto de $A$, pero esto no es posible, por lo tanto se concluye $x\in A$. Inversamente:Si A contiene a todos sus puntos de acumulación se habrá de probar que $A^{c}$ es abierto. Sea $y \in A^{c}$ entonces $y$ no es punto de acumulación de $A$. Por lo tanto, existe una vecindad $r$ de $y$ tal que $A \cap v = \varnothing$. En consecuencia $v_y\subset A^{c}$. Dado que esto es válido $\forall \ y \in A^{c}$ se deduce que $A^{c}$ es abierto $\therefore$ $A$ es cerrado. $\square$
Ejercicio. Sean $A, B\in\mathbb{R}^{n}$. Pruebe que $$(A\bigcup B)’=A’\bigcup B’$$
Demostración. Tenemos que $$x\in (A\bigcup B)’~\Rightarrow~x\in\overline{A\bigcup B}-{x}$$ $$~\Rightarrow~x\in \overline{A-{x}}\bigcup \overline{B-{x}}$$ $$~\Rightarrow~x\in \overline{A-{x}}\acute{o}x\in \overline{B-{x}} $$ $$~\Rightarrow~x\in A’\acute{o}x\in B’$$ $$~\Rightarrow~x\in A’\bigcup B’$$ Inversamente $$A\subset A\bigcup B~\Rightarrow~A’\subset (A\bigcup B)’$$ $$B\subset A\bigcup B~\Rightarrow~B’\subset (A\bigcup B)’$$ de lo anterior se tiene $$A’\bigcup B’\subset (A\bigcup B)’$$ $\square$
Ejercicio. Pruebe que $(A\bigcap B)’\subset A’\bigcap B’$
Demostración.
$$ A\bigcap B~\subset~A~\Rightarrow~(A\bigcap B)’\subset A’$$ $$ A\bigcap B~\subset~B~\Rightarrow~(A\bigcap B)’\subset B’$$ de lo anterior se tiene $$(A\bigcup B)’\subset A’\bigcup B’$$ $\square$
Más adelante
En la siguiente entrada abordaremos el tema de conjuntos convexos, los cuales, se caracterizan porque todos sus puntos resultan ser puntos de acumulación.
Tarea moral
1.- Prueba que si $A \subset \mathbb{R}^n $ es un conjunto arbitrario entonces
$$int(A) \subset A’ \subset int(A) \bigcup Fr(A)$$
2.- Prueba que $A \cup A’= \overline{A}$
3.- Sea $A=\left\{(m,0) \in \mathbb{R}^2 | m \in \mathbb{Z}\right\}$ Describe y prueba quién es $A’$
4.- Determina quien es el $S’$ de $S=\left\{ (\dfrac{1}{n},0 ) |n \in \mathbb{N} \right\} \subset \mathbb{R}^2$
5.-Da un ejemplo de un conjunto $S$ en $\mathbb{R}^2$ donde $S’$ sólo tenga un punto de acumulación y otro donde contenga una infinidad.
Enlaces
El siguiente enlace muestra la gráfica de la sucesión $\fracc{1}{n}$ en geogebra. Puedes modificar en la última entrada el valor de 50, representa la cantidad de elementos de la sucesión, entre más hay, puedes observar como la sucesión tiende al $(0,0)$ que es su punto de acumulación
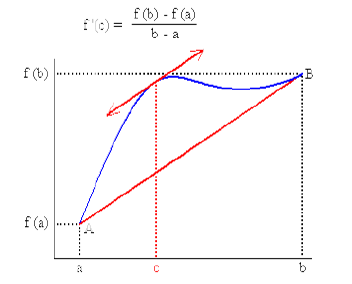
El Teorema del valor medio es un resultado fundamental del cálculo diferencial. En cálculo de una variable nos dice que en algún punto del intervalo, la pendiente de la tangente a la curva (es, decir la derivada) es igual a la pendiente de la recta secante que une los puntos extremos $(a,f(a))$ y $(b,f(b))$. En esta sección estudiaremos para el caso en más dimensiones.
Recordemos el teorema del valor medio para funciones de $\mathbb{R}\rightarrow \mathbb{R}$
Suponga que $f:[a,b]\rightarrow\mathbb{R}$ es derivable en $(a,b)$ y continua en $[a,b]$ entonces existe $c\in(a,b)$ tal que $$f'(c)=\frac{f(b)-f(a)}{b-a}$$
En esta sección se presenta el caso en la versión para funciones de $\mathbb{R}^{n}$ en $\mathbb{R}$. De esta manera el caso general se ve de la siguiente manera:
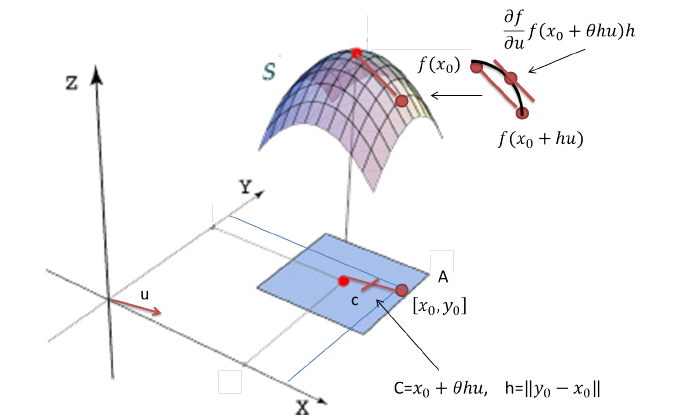
Teorema. Sea $f:A\subset\mathbb{R}^{n} \rightarrow \mathbb{R}$ una función definida en el conjunto abierto $A$ de $\mathbb{R}^{n}$. Si $x_{0},y_{0} \in A$ se pide que el conjunto $A$ sea tal que $[x_0,y_0]=\left\{x_{0}+t(y_{0}-x_{0})~|~t\in[0,1]\right\}\subset A$. Sea $u$ un vector unitario en la dirección del vector $y_{0}-x_{0}$. Si la función $f$ es continua en los puntos del segmento $[x_0,y_0]$ y tiene derivadas direccionales en la dirección del vector $u$ en los puntos del segmento $(x_0,y_0)$, entonces existe $\theta$ , $0<\theta<1$ tal que $f(x_0+hu)-f(x_0)=\displaystyle\frac{\partial f}{\partial u}(x_0+\theta hu)h$ donde $h=|y_0-x_0|$.
Una consecuencia del teorema anterior es el teorema Teorema. Sea $f:A\subset\mathbb{R}^{n} \rightarrow \mathbb{R}$ una función definida en el conjunto abierto $A$ de $\mathbb{R}^{n}$. Si las derivadas parciales $\displaystyle{\frac{\partial f}{\partial x_{i}}~~\forall i=1,..,n}$ son continuas en $x_{0}\in A$ entonces f es diferenciable en $x_{0}\in A$ Vamos a dar una idea de la demostración para el caso n=2
Teorema del Valor Medio para Funciones de $\mathbb{R}^{2}\rightarrow \mathbb{R}$
Teorema. Sea $f:A\subset\mathbb{R}^{2} \rightarrow \mathbb{R}$ una función definida en el conjunto abierto $A$ de $\mathbb{R}^{2}$. Si $x_{0},y_{0} \in A$ se pide que el conjunto $A$ sea tal que $[x_0,y_0]=\left\{x_{0}+t(y_{0}-x_{0})~|~t\in[0,1]\right\}\subset A$. Sea $u$ un vector unitario en la dirección del vector $y_{0}-x_{0}$. Si la función $f$ es continua en los puntos del segmento $[x_0,y_0]$ y tiene derivadas direccionales en la dirección del vector $u$ en los puntos del segmento $(x_0,y_0)$, entonces existe $\theta$ \, $0<\theta<1$ tal que $f(x_0+hu)-f(x_0)=\displaystyle\frac{\partial f}{\partial u}(x_0+\theta hu)h$ donde $h=|y_0-x_0|$.
Demostración. Considere la función $\phi:[0,h]\rightarrow \mathbb{R}$ dada por $\phi(t)=f(x_0+tu)$ ciertamente la función $\phi$ es continua en $[0,h]$ pues $f$ lo es en $[x_0,y_0]$. Ademas
de modo que para $t \in (0,h)$, $\phi'(t)$ existe y es la derivada direccional de $f$ en $x_0+tu \in (x_0,y_0)$ en la dirección del vector $u$. Aplicando entonces el teorema del valor medio a la función $\phi$, concluimos que existe un múmero $\theta \in (0,1)$ que da $\phi(h)-\phi(0)=\phi'(\theta h)h$\ es decir de modo que $$f(x_0+hu)-f(x_0)=\frac{\partial f}{\partial u}(x_0+\theta hu)h$$
Ahora para la verisón del teorema 3
Teorema 5. Sea $f:A\subset\mathbb{R}^{2} \rightarrow \mathbb{R}$ una función definida en el conjunto abierto $A$ de $\mathbb{R}^{n}$. Si las derivadas parciales $\displaystyle{\frac{\partial f}{\partial x},~~\frac{\partial f}{\partial y}}$ son continuas en $(x_{0},y_{0})\in A$ entonces f es diferenciable en $(x_{0},y_{0}\in A$
Demostración. Vamos a probar que $$f((x_{0},y_{0})+(h_{1},h_{2}))=f(x_{0},y_{0})+\frac{\partial f}{\partial x}(x_{0},y_{0})h_{1}+\frac{\partial f}{\partial y}(x_{0},y_{0})h_{2}+r(h_{1},h_{2})$$donde $$\lim_{(h_{1},h_{2})\rightarrow(0,0)}\frac{r(h_{1},h_{2})}{|(h_{1},h_{2})|}=0$$
para ello tenemos que $$r(h_{1},h_{2})=f((x_{0},y_{0})+(h_{1},h_{2}))-f(x_{0},y_{0})-\frac{\partial f}{\partial x}(x_{0},y_{0})h_{1}-\frac{\partial f}{\partial y}(x_{0},y_{0})h_{2}$$ sumando un cero adecuado $$r(h_{1},h_{2})=f((x_{0},y_{0})+(h_{1},h_{2}))-\textcolor{Red}{f(x_{0},y_{0}+h_{2})}+\textcolor{Red}{f(x_{0},y_{0}+h_{2})}-f(x_{0},y_{0})-\frac{\partial f}{\partial x}(x_{0},y_{0})h_{1}-\frac{\partial f}{\partial y}(x_{0},y_{0})h_{2}$$ trabajaremos
$$f((x_{0},y_{0})+(h_{1},h_{2}))-\textcolor{Red}{f(x_{0},y_{0}+h_{2})}$$Considerando la función $\varphi(x)=f(x,y_{0}+h_{2})$ por lo tanto tenemos que $$\varphi'(x)=\lim_{h_{1}\rightarrow0}\frac{\varphi(x+h_{1})-\varphi(x)}{h_{1}}=\lim_{h_{1}\rightarrow0}\frac{f(x+h_{1},y_{0}+h_{2})-f(x,y_{0}+h_{2})}{h_{1}}$$ este limite existe y nos dice que $\varphi$ es es continua en este caso en el intervalo $[x_{0},x_{0}+h_{1}]$. Por lo tanto aplicando el TVM en dicho intervalo se obtiene $$\varphi(x_{0}+h_{1})-\varphi(x_{0})=\varphi'(x_{0}+\theta_{1} h_{1})h_{1}~p.a.~\theta_{1}\in(0,1)$$ es decir $$f((x_{0}+h_{1},y_{0}+h_{2})-\textcolor{Red}{f(x_{0},y_{0}+h_{2})}=\frac{\partial f}{\partial x}(x_{0}+\theta_{1} h_{1},y_{0}+h_{2})h_{1}$$ Analogamente
$$\textcolor{Red}{f(x_{0},y_{0}+h_{2})}-f(x_{0},y_{0})$$Considerando la función $\varphi(y)=f(x_{0},y)$ por lo tanto tenemos que $$\varphi'(y)=\lim_{h_{2}\rightarrow0}\frac{\varphi(x_{0},y_{0}+h_{2})-\varphi(y_{0}+h_{2})}{h_{2}}=\lim_{h_{2}\rightarrow0}\frac{f(x_{0},y_{0}+h_{2})-f(y_{0}+h_{2})}{h_{2}}$$ este limite existe y nos dice que $\varphi$ es es continua en este caso en el intervalo $[y_{0},y_{0}+h_{2}]$. Por lo tanto aplicando el TVM en dicho intervalo se obtiene $$\varphi(y_{0}+h_{2})-\varphi(y_{0})=\varphi'(y_{0}+\theta_{2} h_{2})h_{2}~p.a.~\theta_{2}\in(0,1)$$ es decir $$f((x_{0},y_{0}+h_{2})-\textcolor{Red}{f(x_{0},y_{0})}=\frac{\partial f}{\partial y}(x_{0},y_{0}+\theta_{2}h_{2})h_{2}$$
es decir $$r(h_{1},h_{2})=\left(\frac{\partial f}{\partial x}(x_{0}+\theta_{1} h_{1},y_{0}+h_{2})-\frac{\partial f}{\partial x}(x_{0},y_{0})\right)h_{1}+\left(\frac{\partial f}{\partial y}(x_{0},y_{0}+\theta_{2}h_{2})-\frac{\partial f}{\partial y}(x_{0},y_{0})\right)h_{2}$$ por lo tanto $$\frac{r(h_{1},h_{2})}{|(h_{1},h_{2})|}=\left(\frac{\partial f}{\partial x}(x_{0}+\theta_{1} h_{1},y_{0}+h_{2})-\frac{\partial f}{\partial x}(x_{0},y_{0})\right)\frac{h_{1}}{|(h_{1},h_{2})|}+\left(\frac{\partial f}{\partial y}(x_{0},y_{0}+\theta_{2}h_{2})-\frac{\partial f}{\partial y}(x_{0},y_{0})\right)\frac{h_{2}}{|(h_{1},h_{2})|}$$ ahora bien si $\displaystyle{|(h_{1},h_{2})|\rightarrow(0,0)}$ se tiene $$\left(\frac{\partial f}{\partial x}(x_{0}+\theta_{1} h_{1},y_{0}+h_{2})-\frac{\partial f}{\partial x}(x_{0},y_{0})\right)\rightarrow0$$ y $$\frac{h_{1}}{|(h_{1},h_{2})|}<1$$ Analogamente $$\left(\frac{\partial f}{\partial y}(x_{0},y_{0}+\theta_{2}h_{2})-\frac{\partial f}{\partial y}(x_{0},y_{0})\right)\rightarrow0$$ y $$\frac{h_{2}}{|(h_{1},h_{2})|}<1$$ en consecuencia $$\lim_{(h_{1},h_{2})\rightarrow(0,0)}\frac{r(h_{1},h_{2})}{|(h_{1},h_{2})|}=0$$por lo tanto f es diferenciable en $(x_{0},y_{0})$
Más adelante
Estudiremos la definición del vector gradiente, el cual, contiene las derivadas parciales de una función real y veremos su importancia en relación a una dirección (vector) dado para analizar el crecimiento de una función.
Tarea Moral
Mostrar que la siguiente función es diferenciable en cada punto de su dominio.
En esta sección estudiaremos los conjuntos convexos del espacio $\mathbb{R}^n$. Intuitivamente decimos que un conjunto convexo es aquel que dados dos puntos del conjunto, el segmento de linea que los une también pertenece a ese conjunto.
Definición. Dados $\overline{x},~\overline{y}~\in\mathbb{R}^{n}$, al segmento rectilineo que une dichos puntos lo denotamos $$[\overline{x},\overline{y}]=\{t\overline{y}+(1-t)\overline{x}~|~t\in[0,1]\}$$
Definición. Sea $k\subset \mathbb{R}^{n}$. Se dice que $k$ es convexo si dados dos puntos de k, el segmento que los une está contenido en $k$ es decir $$[\overline{x},\overline{y}]\subset k~~~~\forall~\overline{x},~\overline{y}\in k$$
Ejemplo. Una bola abierta es un conjunto convexo Demostración. Sea $\overline{x}_{0}\in \mathbb{R}^{n}$ y consideremos $\overline{x},~\overline{y}~\in~B(\overline{x}_{0},\epsilon)$ vamos a ver que $[\overline{x},\overline{y}]\in~B(\overline{x}_{0}\epsilon)$ tenemos que
$$\overline{x} \in B(\overline{x}_{0},\epsilon)~\Rightarrow~|\overline{x}-\overline{x}_{0}|<\epsilon$$ y $$\overline{y}\in B(\overline{x}_{0},\epsilon) ~\Rightarrow~|\overline{y}- \overline{x}_{0} | <\epsilon$$ por lo tanto
$$|[\overline{x},\overline{y}]-\overline{x}_{0}|=|t\overline{y}+(1-t)\overline{x}-\overline{x}_{0}|=|t(\overline{y}-\overline{x}_{0})+(1-t)(\overline{x}-\overline{x}_{0})|\leq t|\overline{y}-\overline{x}_{0}|+(1-t)|\overline{x}-\overline{x}_{0}|<$$ $$t\epsilon+(1-t)\epsilon=\epsilon\therefore|[\overline{x},\overline{y}]-\overline{x}_{0}|<\epsilon$$ y de esta manera $$[\overline{x},\overline{y}]\in~B(\overline{x}_{0},\epsilon)$$
Ejemplo. El cuadrado $A=[-1,1]\times [-1,1]$ es un conjunto convexo Demostración. Sean $\overline{x}=(x_{1},x_{2})$, $\overline{y}=(y_{1},y_{2})$ $\in A$ y $t\in [0,1]$ vamos a ver que $t\overline{y}+(1-t)\overline{x}\in A$, tenemos que $$t\overline{y}+(1-t)\overline{x}=(ty_{1},ty_{2})+((1-t)x_{1},(1-t)x_{2})=(ty_{1}+(1-t)x_{1},ty_{2}+(1-t)x_{2})$$ como $x_{1},~x_{2},~y_{1},~y_{2}$ son tal que $$-1\leq x_{1}\leq 1$$
$$-1\leq x_{2}\leq 1 $$
$$ -1\leq y_{1}\leq 1 $$
$$ -1\leq y_{2}\leq 1$$ entonces
$$-1\leq t(-1)+(1-t)(-1)\leq ty_{1}+(1-t)x_{1}\leq t(1)+(1-t)(1)\leq 1$$ $$1\leq t(-1)+(1-t)(-1)\leq ty_{2}+(1-t)x_{2}\leq t(1)+(1-t)(1)\leq 1$$ por lo que $$(ty_{1}+(1-t)x_{1},ty_{2}+(1-t)x_{2})\in [-1,1]\times [-1,1]$$ por lo tanto $$t\overline{y}+(1-t)\overline{x}\in A$$
Teorema. Si $\overline{x_{1}},\overline{x}{2},…,\overline{x}{n}\in \mathbb{R}^{n}$ son conjuntos convexos tales que $\displaystyle{\bigcap \overline{x_{i}}}\neq\emptyset~~\forall i=1,..,n$ entonces $\displaystyle{\bigcap \overline{x_{i}}}$ es un conjunto convexo.
Demostración. Sean $\overline{x},~\overline{y}\in \displaystyle{\bigcap \overline{x_{i}}}$ entonces para todo i se tiene que $$\overline{x},~\overline{y}\in \overline{x}{i}$$ como $\overline{x}{i}$ es convexo entonces $[\overline{x},\overline{y}]\in \overline{x}{i}$ para todo i, por lo tanto $$[\overline{x},\overline{y}]\subset\displaystyle{\bigcap \overline{x{i}}}$$ por lo tanto $\displaystyle{\bigcap \overline{x_{i}}}$ es convexo.
Teorema. Un conjunto convexo es conexo
Demostración. Dado un conjnuto X convexo, si X no fuera conexo entonces existirian A,B conjnutos abiertos separados tales que $X=A\bigcup B$ y $A\bigcap B=\emptyset$ y si consideramos $\overline{x},~\overline{y}\in X$ entonces el segmento $[\overline{x},\overline{y}]$ se puede parametrizar como $$f(t)=t\overline{y}+(1-t)\overline{x}~t\in [0,1]$$ y podríamos construir los abiertos $$\{t \in[0,1]~|~f(t)\in A \}$$ y $$\{t\in[0,1]~|~f(t)\in B \}$$ estos abiertos proporcionarían una disconexion para el segmento rectilineo $\underset{\circ}{\bigtriangledown}$ pues ya hemos probado que un segmento rectilineo es conexo, por lo tanto X es conexo.
Ejemplo. Un conjunto Conexo no es convexo, considere el conjunto $$A=\mathbb{R}^{2}- \{(x,y)\in\mathbb{R}^{2}~|~x\leq 0,~y=0\}$$ Vamos a mostrar que A es conexo pero no convexo\ Dado $(x,y)\in~A$ tomamos tres casos\ Caso (1) y=0 y $x>0$\ Consideremos el segmento $$[x,x_{0}]=[(x,x_{0}),(1,0)]$$ que esta dado por $${(x+t(1-x),0)=((1-t)x+t,0)\in\mathbb{R}^{2}~|~t\in[0,1]}$$ y como $(1-t)x+t>0$ para todo $t\in[0,1]$. Se tiene que esta contenido en A.\ Caso (2) $y>0$ y $x\in\mathbb{R}$. En este caso el segmento $$[x,x_{0}]=[(x,x_{0}),(1,0)]$$ que esta dado por $${(x+t(1-x),y-ty)=((1-t)x+t,(1-t)y)\in\mathbb{R}^{2}~|~t\in[0,1]}$$ se tiene que $$(1-t)y>0\forall~t\in[0,1)$$ para $t=1$ se tiene el punto $(1,0)=x_{0}$, entonces en este caso también dicho segmento esta contenido en A.\ Caso (3) $y<0$ y $x\in\mathbb{R}$. En este caso el segmento $$[x,x_{0}]=[(x,x_{0}),(1,0)]$$ que esta dado por $${(x+t(1-x),y-ty)=((1-t)x+t,(1-t)y)\in\mathbb{R}^{2}~|~t\in[0,1]}$$ se tiene que $$(1-t)y<0\forall~t\in[0,1)$$ para $t=1$ se tiene el punto $(1,0)=x_{0}$, entonces en este caso también dicho segmento esta contenido en A. Solo falta ver que el conjnuto A no es convexo
Si consideramos el punto $x=(-1,1)$ y el punto $y=(-1,-1)$ se tiene que $x,y\in A$ y sin embargo el punto $$(-1,0)=x+\left(\frac{1}{2}\right)(y-x)\in [x,y]$$ pero no pertenece a A, es decir $[x,y] \cancel{\subset}A$
Más adelante
En la siguiente entrada abordaremos el tema de sucesiones. La idea generalizada de convergencia de una sucesión nos dice que a medida que los índices de una sucesión avanzan entonces los términos se tienen que acercar más entre sí.
Traea Moral
1.-Determina si los siguientes conjuntos son convexos:
Proposición:Si A y B son subconjuntos abiertos de $\mathbb{R}^{n}$, entonces $A\bigcup B$ es un conjunto abierto de $\mathbb{R}^{n}$. Demostración. Sea $\overline{x}\in A\cup B$. Se tiene entonces que $\overline{x}\in A$ ó $\overline{x}\in B$. Si $\overline{x}\in A$, entonces, puesto que A es abierto existe $r>0$ tal que $B_{r}(\overline{x})\subset A$, luego $B_{r}(\overline{x})\subset A\cup B$ Si $\overline{x}\in B$, entonces, puesto que B es abierto existe $r>0$ tal que $B_{r}(\overline{x})\subset B$, luego $B_{r}(\overline{x})\subset A\cup B$. En cualquiera de los casos, existe una bola abierta $B_{r}$ contenida en $A\cup B$. $\therefore$ $A\cup B$ es abierto.$~~\blacksquare$
Proposición. Si A y B son subconjuntos abiertos de $\mathbb{R}^{n}$, entonces $A\bigcap B$ es un conjunto abierto de $\mathbb{R}^{n}$. Demostración. Sea $\overline{x}\in A\cup B$. Se tiene entonces que $\overline{x}\in A$ y $\overline{x}\in B$. Puesto que A es abierto $\exists~r_{1}>0$ tal que $B(\overline{x},r_{1})\subset A$. Puesto que b es abierto $\exists~r_{2}>0$ tal que $B(\overline{x},r_{2})\subset B$.\Sea $r=\min{r_{1},r_{2}}$, entonces se tiene que \begin{align*} B(\overline{x},r) & \subset B(\overline{x},r_{1}) \\ B(\overline{x},r) & \subset B(\overline{x},r_{2}) \end{align*} Por lo tanto $B(\overline{x},r)\subset A$ y $B(\overline{x},r)\subset B$, o sea $B(\overline{x},r)\subset A\cap B$.$~~\blacksquare$
Proposición. Si A y B son subconjuntos cerrados de $\mathbb{R}^{n}$, entonces $A\bigcup B$ es un conjunto cerrado de $\mathbb{R}^{n}$. Demostración. Para mostrar que $A\bigcup B$ es un conjunto cerrado, tenemos que mostrar que $(A\bigcup B)^{c}$ es un conjunto abierto, al ser A, B conjuntos cerrados entonces $A^{c},~B^{c}$ son conjuntos abiertos y por leyes de D’morgan $$(A\bigcup B)^{c}=A^{c}\bigcap B^{c}$$ ahora bien por el resultado anterior se tiene que la intersección de conjuntos abiertos es un conjunto abierto, esto prueba que $(A\bigcup B)^{c}$ es un conjunto abierto, por lo tanto $A\bigcup B$ es un conjunto cerrado.$~~\blacksquare$
Proposición. Si A y B son subconjuntos cerrados de $\mathbb{R}^{n}$, entonces $A\bigcap B$ es un conjunto cerrado de $\mathbb{R}^{n}$. Demostración. Para mostrar que $A\bigcap B$ es un conjunto cerrado, tenemos que mostrar que $(A\bigcap B)^{c}$ es un conjunto abierto, al ser A, B conjuntos cerrados entonces $A^{c},~B^{c}$ son conjuntos abiertos y por leyes de D’morgan $$(A\bigcap B)^{c}=A^{c}\bigcup B^{c}$$ ahora bien por el resultado anterior se tiene que la unión de conjuntos abiertos es un conjunto abierto, esto prueba que $(A\bigcap B)^{c}$ es un conjunto abierto, por lo tanto $A\bigcap B$ es un conjunto cerrado.$~~\blacksquare$
Generalizaciones de la proposiciones anteriores de la familias de conjuntos.
Proposición. La unión arbitraria de conjuntos abiertos en $\mathbb{R}^{n}$ es un conjunto abierto en $\mathbb{R}^{n}$. Demostración. Sea ${A_{\alpha}}$ una colección de subconjuntos de $\mathbb{R}^{n}$ tal que $A_{\alpha}$ es un conjunto abierto en $\mathbb{R}^{n}$. Sea $\displaystyle{A=\bigcup A_{\alpha}}$. Sea $\overline{x}_{0}\in A$. Entonces existe $\alpha$ tal que $\overline{x}_{0}\in A_{\alpha}$ y como $A_{\alpha}$ es un conjunto abierto, existe $r>0$ tal que $$B(\overline{x}_{0},r)\subset A{\alpha}\subset \bigcup A_{\alpha}=A$$ Por lo tanto A es abierto.$~~\blacksquare$
Propposición. La intersección finita de conjuntos abiertos en $\mathbb{R}^{n}$ es un conjunto abierto en $\mathbb{R}^{n}$. Demostración. Sean $A_{1},A_{2},…,A_{k}$ subconjutos abiertos de $\mathbb{R}^{n}$. Sea $\displaystyle{B=\bigcap_{i=1}^{k}A_{i}=A_{1}\cap A_{2}\cap …\cap A_{k}}$. Sea $\overline{x}_{0}\in B$. Entonces $\overline{x}_{0}\in A_{i}$ para toda $1\leq i\leq k$. Cada $A_{i}$ es un conjunto abierto. Por lo tanto existe $r_{i}>0$ tal que $B(\overline{x}_{0},r{i})\subset A_{i}$ para toda $1\leq i\leq k$. Sea $r=\min{r_{1},r_{2},…,r_{n}}>0$. Entonces $$B(\overline{x}_{0},r)\subset B(\overline{x}_{0},r_{i})\subset A_{i}~~\forall~i=1,…,n$$ Por lo tanto $$B(\overline{x}_{0},r)\subset \bigcap_{i=1}^{k}A_{i}=B$$ y por lo tanto B es un conjunto abierto.$~~\blacksquare$
Proposición. La unión finita de conjuntos cerrados en $\mathbb{R}^{n}$ es un conjunto cerrado en $\mathbb{R}^{n}$. Demostración. Sean $A_{1},…,A_{k}\subset \mathbb{R}^{n}$ conjuntos cerrados y sea $\displaystyle{B=\bigcup_{i=1}^{n}A_{i}}$. Entonces $$B^{c}=\left(\bigcup_{i=1}^{n}A_{i}\right)^{c}=\bigcap_{i=1}^{n}A^{c}_{i}$$ el cual es un conjunto abierto de $\mathbb{R}^{n}$. Por lo tanto B es un conjunto cerrado de $\mathbb{R}^{n}$.$~~\blacksquare$
Proposición. La intersección finita de conjuntos cerrados en $\mathbb{R}^{n}$ es un conjunto cerrado en $\mathbb{R}^{n}$. Demostración. Sea ${A_{\alpha}}$ una colección de subconjuntos de $\mathbb{R}^{n}$ tales que cada $A_{\alpha}$ es cerrado en $\mathbb{R}^{n}$. Por lo tanto para cada $\alpha$, $A^{c}{\alpha}$ es un conjunto abierto en $\mathbb{R}^{n}$. Sea $\displaystyle{A=\bigcap{\alpha}A_{\alpha}}$ tal que $$A^{c}=\left(\bigcap_{\alpha}A_{\alpha}\right)^{c}=\bigcup_{\alpha}A^{c}_{\alpha}$$ es un conjunto abierto en $\mathbb{R}^{n}$. Por lo tanto A es un conjunto cerrado en $\mathbb{R}^{n}$.$~~\blacksquare$
Definición. Un elemento $\bar{x}\in A$ se dice que es un $\textbf{punto interior}$ de $A$, si existe una bola abierta con centro en $\bar{x}$ contenida en $A$ es decir si $\exists$ $r>0$ tal que $B(\bar{a},r)\subset A$. Denotamos por $int(A)$ al conjunto formado por todos estos puntos, es decir $$int(A)=\{\overline{x}\in\mathbb{R}^{n}~|~\overline{x}~es~punto~interior~de~A\}$$ y diremos que este conjunto es el interior de A.
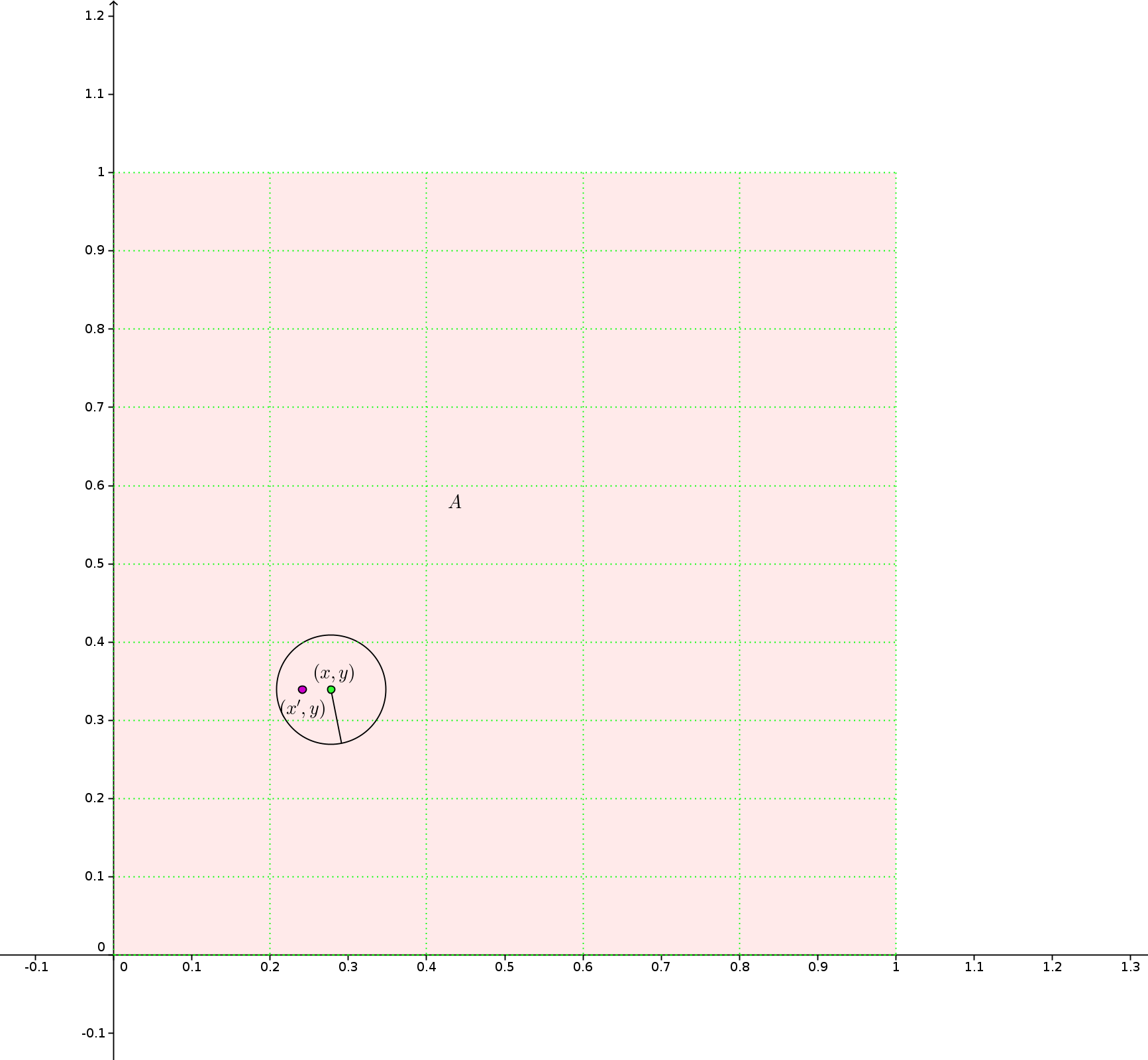
Ejemplo. Determinar el $int(A),~~Fr(A),~~ext(A)$ con \[ A=\left[0,1\right]\times\left[0,1\right]\cap\left(\mathbb{Q}\times\mathbb{Q}\right)=\left\{ (x,y)\in\mathbb{R}^{2}~\big{|}~(x,y)\in\mathbb{Q}~~y~~0\leq x\leq1~~0\leq y\leq1\right\} . \]
Solución. Primero analicemos la figura, ¿qué pasa si tomamos un $(x,y)$ en $A$ y un $r>0$?, ¿qué podemos observar?. Si recordamos la densidad de los irracionales sabemos que podemos encontrar un $x’$ irracional entre $x$ y $x+r$, entonces si tomamos el punto $(x’,y)$ podemos ver que esta dentro de $B_{r}(x,y)$, pero $(x’,y)$ no es un punto de $A$. Esto pasa para toda $r>0$ y todo $(x,y)$ en $A$. Entonces, podemos afirmar que el $int(A)=\emptyset$. Ademas, podemos decir que para todo $(x,y)$ en $A$ y todo $r>0$ se tiene que $B_{r}(x,y)\cap A^{c}\neq\emptyset$. Usando el mismo argumento, pero ahora para los racionales, podemos decir que para cualquier $(x,y)$ y $r>0$ se tiene que $B_{r}(x,y)\cap A\neq\emptyset$. Todo esto dentro del cuadrado $\left[0,1\right]\times\left[0,1\right]$. Entonces, podemos afirmar que $Fr(A)=\left[0,1\right]\times\left[0,1\right]$.
¿Que podemos decir del exterior? De lo anterior podemos deducir que $ext(A)=\mathbb{R}{{}^2}-\left[0,1\right]\times\left[0,1\right]$. Entonces, demostremos la siguiente afirmación:
Afirmación: $int(A)=\emptyset$ Demostración. Sean $(x,y)\in A$ y $r>0$. Mostraremos que $B_{r}(x,y)\cap A^{c}\neq\emptyset$, es decir, que para cualquier punto $(x,y)$ de $A$ y cualquier radio $r>0$, la bola $B_{r}(x,y)$ siempre contiene puntos de $A^{c}$, es decir, que $A$ no tiene puntos interiores. Como $(x,y)\in A$, entonces $x\in\mathbb{Q}$ y por la densidad de los irracionales sabemos que siempre existe un $x’\notin\mathbb{Q}$ tal que $x<x'<x+r$……$\bigstar$ Tomemos el punto $(x’,y)$ y calculemos su distancia con $(x,y)$: \[ \| (x,y)-(x’,y)\|=\| (x-x’,0)\|=\sqrt{(x-x’)^{2}}=\underset{**}{\underbrace{\left|x-x’\right|<r}}\text{ esta ultima desigualdad se cumple por }\bigstar \] Veamos por que se cumple $**$. De $\bigstar$ tenemos que $x<x'<x+r$, restando $x$ tenemos $x-x<x’-x<x+r-x$ $\Longrightarrow0<x’-x<r$ como esto es positivo, le podemos sacar el valor absouto y se mantiene la desigualdad $0<|x’-x|<r$ y sabemos que $|a-b|=|b-a|$. Por lo tanto, $|x-x’|<r$. Entonces, como $\left\Vert (x,y)-(x’,y)\right\Vert <r$, tenemos que $(x’,y)\in B_{r}(x,y)$, pero como $x’\notin\mathbb{Q}$ esto implica que $(x’,y)\notin\mathbb{Q}\times\mathbb{Q}$. Por lo tanto, $B_{r}(x,y)\cap\left(\mathbb{R}^{2}-\mathbb{Q}\times\mathbb{Q}\right)\neq\emptyset$. Podemos observar que $A\subset\mathbb{Q}\times\mathbb{Q}$ $\Longrightarrow$ $B_{r}(x,y)\cap\left(\mathbb{R}^{2}-A\right)=B_{r}(x,y)\cap A^{c}\neq\emptyset$, es decir, que para todo $r>0$ se tiene que $B_{r}(x,y)$ siempre interseca a $A^{c}$. Por lo tanto, $int(A)=\emptyset$.$~~\blacksquare$
Afirmación: $Fr(A)=\left[0,1\right]\times\left[0,1\right]$ Demostración. Primero mostraremos que $\left[0,1\right]\times\left[0,1\right]\subset Fr(A)$. Sea $(x,y)\in\left[0,1\right]\times\left[0,1\right]$ y $r>0$. Ya probamos que $B_{r}(x’,y’)\cap A^{c}\neq\emptyset$, falta probar que $B_{r}(x,y)\cap A\neq\emptyset$. (Para que se cumpla la definición de frontera). Tenemos varios casos para $x$ y $y$: $(1)$ Supongamos que $0\leq x<1$ y $0\leq y<1$. Por la densidad de los números racionales, sabemos que existen $x’,y’\in\mathbb{Q}$ tal que: \[ x<x'<min\left\{1,x+\frac{r}{\sqrt{2}}\right\},\text{y }y<y'<min\left\{1,y+\frac{r}{\sqrt{2}}\right\}…………………\clubsuit \] Entonces, $\underset{\spadesuit}{\underbrace{(x’,y’)\in A}}$ y además $\displaystyle{|x-x’|<\frac{r}{\sqrt{2}}}$ y $\displaystyle{|y-y’|<\frac{r}{\sqrt{2}}}$. Así podemos ver lo siguiente: \[ ||(x,y)-(x’,y’)||=\sqrt{(x-x’)+(y-y’)}<\sqrt{\left(\frac{r}{\sqrt{2}}\right)^{2}+\left(\frac{r}{\sqrt{2}}\right)^{2}}=r, \] lo que nos dice que el punto $(x’,y’)\in B_{r}(x,y)$, y por $\spadesuit$ tenemos que $B_{r}(x,y)\cap A\neq\emptyset$. $(2)$ En este caso juntaremos los casos que faltan. Escogiendo a $x’,y’$ como en $\clubsuit$, tenemos lo siguiente: (a) Si $x=1$ y $y<1$ nos fijamos en la pareja $(1,y’)$, (b) Si $x<1$ y $y=1$ nos fijamos en la pareja $(x’,1)$, y (c) Si $x=1$ y $y=1$nos fijamos en la pareja $(1,1)$. Podemos observar que estos puntos están en $A$, pues sus entradas pertenecen a los racionales. Por lo tanto, $B_{r}(x,y)\cap A\neq\emptyset$. Por lo tanto, $\left[0,1\right]\times\left[0,1\right]\subset Fr(A)$.
Afirmación: $ext(A)=\mathbb{R}^{2}-\left[0,1\right]\times\left[0,1\right]$ Demostración. Primero mostremos que $\mathbb{R}^{2}-\{\left[0,1\right]\times\left[0,1\right]\}\subset ext(A)$. Sea $(x,y)\in\mathbb{R}^{2}-\{\left[0,1\right]\times\left[0,1\right]\}$ y supongamos que $x<0$ ó $1<x$, (la otra posibilidad es que $y<0$ ó $y>1$, pero se hace de manera análoga). (1) Si $x<0$, entonces tomamos $r=|x|>0$. Vamos a mostrar que $B_{r}(x,y)\subset\mathbb{R}^{2}-\{\left[0,1\right]\times\left[0,1\right]\}$. Observemos que $\mathbb{R}^{2}\{\left[0,1\right]\times\left[0,1\right]\}\subset A^{c}…………..\spadesuit$. Sea $(x’,y’)\in B_{r}(x,y)$, sabemos que \[ |x-x|\leq\left\Vert (x,y)-(x’,y’)\right\Vert <r \] pero $|x|=r$, entonces \[ |x-x’|<|x|=-x\text{ pues }x<0 \] entonces \[ x<x-x'<-x\Longrightarrow-x+x<-x+x-x'<-x-x\Longrightarrow0<-x'<-2x \] multiplicando por $(-1)$, tenemos que $x'<0$, lo cual implica que $(x’,y’)\notin\left[0,1\right]\times\left[0,1\right]$. Así tenemos que $(x’,y’)\in\mathbb{R}^{n}-\left[0,1\right]\times\left[0,1\right]$. Entonces, $B_{r}(x,y)\subset\mathbb{R}^{n}-\left[0,1\right]\times\left[0,1\right]$. Por lo tanto, por $\spadesuit$, $B_{r}(x,y)\subset A^{c}$, lo cual implica que $(x,y)\in ext(A)$. (2) Si $x>1$, entonces tomamos $r=x-1>0$. Vamos a mostrar que $B_{r}(x,y)\subset\mathbb{R}^{2}-\{\left[0,1\right]\times\left[0,1\right]\}$. Observemos que $\mathbb{R}^{2}\{\left[0,1\right]\times\left[0,1\right]\}\subset A^{c}…………..\spadesuit$. Sea $(x’,y’)\in B_{r}(x,y)$, sabemos que
Vamos a mostrar que $B_{r}(x,y)\subset\mathbb{R}{{}^2}-\left[0,1\right]\times\left[0,1\right]$. Observemos que $\mathbb{R}{{}^2}\left[0,1\right]\times\left[0,1\right]\subset A^{c}…………..\spadesuit$.\ Sea $(x’,y’)\in B_{r}(x,y)$, sabemos que \[ |x-x’|\leq\left\Vert (x,y)-(x’,y’)\right\Vert <r=x-1 \]
entonces tenemos que $x’>1$, lo cual nos dice que $(x’,y’)\notin\left[0,1\right]\times\left[0,1\right]$. Así tenemos que $(x’,y’)\in\mathbb{R}^{n}-\{\left[0,1\right]\times\left[0,1\right]\}$. Entonces, $B_{r}(x,y)\subset\mathbb{R}^{n}-\{\left[0,1\right]\times\left[0,1\right]\}$. Por lo tanto, por $\spadesuit$, $B_{r}(x,y)\subset A^{c}$, lo cual implica que $(x,y)\in ext(A)$. Por lo tanto, $\mathbb{R}^{2}-\{\left[0,1\right]\times\left[0,1\right]\}\subset ext(A)$. De la proposición tenemos que $\mathbb{R}^{n}=int(A)\cup ext(A)\cup Fr(A)$, en nuestro caso obtuvimos que $int(A)=\emptyset$. Entonces,
\[ \mathbb{R}{{}^2}=ext(A)\cup Fr(A) \] y de esto obtenemos las siguientes igualdades \[ \mathbb{R}{{}^2}-ext(A)=Fr(A)………\clubsuit\text{ y }\mathbb{R}{{}^2}-Fr(A)=ext(A)………\clubsuit\clubsuit. \] De $\clubsuit$ tenemos $Fr(A)\subset\mathbb{R}{{}^2}-ext(A)$ y de $(2)$ tenemos $\left[0,1\right]\times\left[0,1\right]\subset Fr(A)$, entonces $\left[0,1\right]\times\left[0,1\right]\subset Fr(A)\subset\mathbb{R}{{}^2}-ext(A)………….\maltese$ De $(3)$ tenemos $\mathbb{R}^{2}-\left[0,1\right]\times\left[0,1\right]\subset ext(A)$, entonces
entonces \[ \mathbb{R}^{2}\subset ext(A)\cup\left[0,1\right]\times\left[0,1\right]\Longrightarrow\mathbb{R}^{2}-ext(A)\subset\left(ext(A)\cup\left[0,1\right]\times\left[0,1\right]\right)-ext(A) \]
así tenemos \[ \mathbb{R}^{2}-ext(A)\subset\left[0,1\right]\times\left[0,1\right]…………..\maltese\maltese \]
Entonces, por $\maltese$ y $\maltese\maltese$ tenemos que $Fr(A)=\left[0,1\right]\times\left[0,1\right]$. Y de esta igualdad y de $\clubsuit\clubsuit$ tenemos que $ext(A)=\mathbb{R}^{2}-\left[0,1\right]\times\left[0,1\right]$.$~~\blacksquare$
Proposición: Si $A\subset\mathbb{R}^{n}$, entonces: (1) $int(A)\subset A$ (2) $ext(A)\subset A^{c}$ (3) (a) $int(A)\cap ext(A)=\emptyset$, (b) $int(A)\cap Fr(A)=\emptyset$ y (c) $Fr(A)\cap ext(A)=\emptyset$ (4) $\mathbb{R}^{n}=int(A)\cup ext(A)\cup Fr(A)$ (5) $int(A^{c})=ext(A)$ y $Fr(A)=Fr(A^{c})$.
Demostración. (1) Por demostrar que $int(A)\subset A$. Sea $\hat{x}\in int(A)$ $\Longrightarrow$ por definición que existe $r>0$ tal que $B_{r}(\hat{x})\subset A$. Como $\hat{x}\in B_{r}(\hat{x})$ (por definición de bola), entonces $\hat{x}\in A$. Por lo tanto, $int(A)\subset A$.
(2) Por demostrar que $ext(A)\subset A^{c}$. Sea $\hat{x}\in ext(A)$ $\Longrightarrow$ por definición que existe $r>0$ tal que $B_{r}(\hat{x})\subset A^{c}$. Como $\hat{x}\in B_{r}(\hat{x})$ (por definición de bola), entonces $\hat{x}\in A^{c}$. Por lo tanto, $ext(A)\subset A$.
3_aPor demostrar que $int(A)\cap ext(A)=\emptyset$. Supongamos por contadicción que $int(A)\cap ext(A)\neq\emptyset$, esto implica que existe $\hat{x}\in int(A)\cap ext(A)$ $\Longrightarrow$ $\hat{x}\in int(A)$ y $\hat{x}\in ext(A)$, esto implica por (1) y (2) que $\hat{x}\in A$ y $\hat{x}\in A^{c}$, lo cual es una contradicción. Por lo tanto, $int(A)\cap ext(A)=\emptyset$.
3_b Por demostrar que $int(A)\cap Fr(A)=\emptyset$. Supongamos por contadicción que $int(A)\cap Fr(A)\neq\emptyset$, esto implica que existe $\hat{x}\in int(A)\cap Fr(A)$ $\Longrightarrow$ $\hat{x}\in int(A)$ y $\hat{x}\in Fr(A)$. Así, tenemos lo siguiente: $(a).$ Existe $r>0$ tal que $B_{r}(\hat{x})\subset A$, y $(b).$ Para todo $r’>0$ se tiene que $B_{r’}(\hat{x})\cap A\neq\emptyset$ y $B_{r’}(\hat{x})\cap A^{c}\neq\emptyset$. En particular, por $(a)$, para $r>0$ tenemos que $B_{r}(\hat{x})\cap A^{c}=\emptyset$, lo cual contradice la hipótesis $(b)$. Por lo tanto, $int(A)\cap Fr(A)=\emptyset$.
3_c Por demostrar que $Fr(A)\cap ext(A)=\emptyset$. Supongamos por contradicción que $Fr(A)\cap ext(A)\neq\emptyset$, esto implica que existe $\hat{x}\in Fr(A)\cap ext(A)$ $\Longrightarrow$ $\hat{x}\in Fr(A)$ y $\hat{x}\in ext(A)$. Así, tenemos lo siguiente: $(a).$ Para todo $r>0$ se tiene que $B_{r’}(\hat{x})\cap A\neq\emptyset$ y $B_{r’}(\hat{x})\cap A^{c}\neq\emptyset$, y $(b).$ Existe $r’>0$ tal que $B_{r’}(\hat{x})\subset A^{c}$. Así, por $(b)$tenemos que existe $r’>0$ tal que $B_{r’}(\hat{x})\cap A=\emptyset$, lo cual contradice la hipótesis $(a)$. Por lo tanto, $Fr(A)\cap ext(A)=\emptyset$.
(4) Por demostrar que $\mathbb{R}^{n}=int(A)\cup Fr(A)\cup ext(A)$. Como $A\subset\mathbb{R}^{n}$, se tiene que $int(A)\cup Fr(A)\cup ext(A)\subset\mathbb{R}^{n}$. Falta ver que $\mathbb{R}^{n}\subset int(A)\cup Fr(A)\cup ext(A)$. Sea $\hat{x}\in\mathbb{R}^{n}$, como $A\subset\mathbb{R}^{n}$entonces tenemos tres casos:
$(a)$ Existe $r>0$ tal que $B_{r}(\hat{x})\subset A$, entonces por definición tenemos que $\hat{x}\in int(A)$,
$(b)$ existe $r>0$ tal que $B_{r}(\hat{x})\subset A^{c}$, entonces por defición tenemos que $\hat{x}\in ext(A)$, o $(c)$ para todo $r>0$ se tiene que $B_{r}(\hat{x})\cap A^{c}\neq\emptyset$ y $B_{r}(\hat{x})\cap A\neq\emptyset$, entonces por definición $\hat{x}\in Fr(A)$. Así tenemos que, $\mathbb{R}^{n}\subset int(A)\cup Fr(A)\cup ext(A)$. Por lo tanto, $\mathbb{R}^{n}=int(A)\cup Fr(A)\cup ext(A)$.
$(5)$ (a) Por demostrar que $int(A^{c})=ext(A)$. $\subset\rfloor$ $int(A^{c})\subset ext(A)$ Sea $\hat{x}\in int(A^{c})$, por definición se tiene que existe $r>0$ tal que $B_{r}(\hat{x})\subset A^{c}$, pero esta es la definición de un punto exterior de $A$. Por lo tanto, $\hat{x}\in ext(A)$. $\supset\rfloor$ $ext(A)\subset int(A^{c})$. Sea $\hat{x}\in ext(A)$, por definición se tiene que existe $r>0$ tal que $B_{r}(\hat{x})\subset A^{c}$, pero esta es la definición de un punto interior de $A^{c}$. Por lo tanto, $\hat{x}\in int(A^{c})$. Por lo tanto, $int(A^{c})=ext(A)$.$~~\blacksquare$
Definición. Sea $A\subset \mathbb{R}^{n}$. Definimos la cerradura de A, que denotamos por $\overline{A}$, como $$\overline{A}=int(A)\cup Fr(A)$$
Proposición. Sea $A\subset \mathbb{R}^{n}$. Las siguientes afirmaciones son ciertas: (1) $Int(A)$ es un conjunto abierto (2) $Ext(A)$ es un conjunto abierto (3) $Fr(A)$ es un conjunto cerrado (4) $\overline{A}$ es un conjunto cerrado. Demostración. (1) Sea $\overline{x}\in Int(A)$, entonces existe $r>0$ tal que $B(\overline{x},r)\subset A$. Sea $\overline{y}\in B(\overline{x},r)$, existe $r’>0$ tal que $B(\overline{y},r’)\subset B(\overline{x},r)\subset A$ por lo que $\overline{y}\in Int(A)$ y por tanto $B(\overline{x},r)\subset Int(A)$. (2) Como $Ext(A)=Int(A^{c})$ y de acuerdo al inciso anterior este conjunto es abierto. (3) Tenemos que $$(Fr(A))^{c}=\mathbb{R}^{n}-Fr(A)=int(A)\cup Ext(A)$$ ambos conjuntos son conjuntos abiertos y la unión de conjuntos abiertos es abierta, entonces este conjunto es abierto y por tanto $Fr(A)$ es cerrado. (4) Se tiene que $$(\overline{A}^{c})=\mathbb{R}^{n}-(int(A)\cup Fr(A))=ext(A)$$ el cual es conjunto abierto, por lo tanto $\overline{A}$ es un conjunto cerrado.$~~\blacksquare$
Punto de Acumulación
Definición. Sea $A\subset\mathbb{R}^{n}$ y $\overline{x}\in\mathbb{R}^{n}$. Se dice que (1) $\overline{x}$ es un punto de acumulación de A, si toda bola abierta con centro en $\overline{x}$ contiene un punto de A distinto de $\overline{x}$ es decir $$\forall r>0, \quad \left(B(\overline{x},r)-{\overline{x}}\right)\cap A\neq \emptyset$$ Al conjunto de puntos de acumulación de A se le denomina el $\textbf{conjunto derivado}$ de A y se le denota $A’$. (2) $\overline{x}\in A$ es un punto aislado de A si $\overline{x}$ no es un punto de acumulación de A, es decir, si existe $r>0$ tal que $$(B(\overline{x},r)-{\overline{x}})\cap A=\emptyset.$$
Ejemplo. Sea $$A=\{(x,y)\in\mathbb{R}^{2}~|~x^{2}+y^{2}<1\}$$ Muestre que $\displaystyle{\overline{x}_{0}=\left(\frac{1}{\sqrt{2}},\frac{1}{\sqrt{2}}\right)}$ es un punto de acumulación de A. Solución. Vamos a considerar el punto $\displaystyle{\overline{x}=\left(\frac{1}{\sqrt{2}(r+1)},\frac{1}{\sqrt{2}(r+1)}\right)}$, para $r>0$. Tenemos entonces que
Tenemos entonces que $\displaystyle{\overline{x}\in B\left(\left(\frac{1}{\sqrt{2}},\frac{1}{\sqrt{2}}\right),r\right)}$. Por lo tanto $$\left[B\left(\left(\frac{1}{\sqrt{2}},\frac{1}{\sqrt{2}}\right),r\right)-\left\{\left(\frac{1}{\sqrt{2}},\frac{1}{\sqrt{2}}\right)\right\}\right]\bigcap A\neq \emptyset$$ Por lo tanto $\displaystyle{\overline{x}_{0}=\left(\frac{1}{\sqrt{2}},\frac{1}{\sqrt{2}}\right)}$ es un punto de acumulación de A.$~~\blacksquare$
Más adelante
En la siguiente sección continuaremos estudiando topológicamente los conjuntos importantes obtenidos a partir de la caracterización de puntos de $\mathbb{R}^n$
Tarea Moral
1.- Si $A\subset \mathbb{R^n}$ es un conjunto arbitrario demuestra que $int(A) \subset A´ \subset int(A) \cup Fr(A)$
2.- Sea $A \in \mathbb{R}^n$ prueba que: $A$ no puede ser cerrado y abierto a la vez.
4.-Sean $A$ y $B$ subconjuntos de $\mathbb{R}^n$. Indica y prueba si las siguientes afirmaciónes son ciertas.
a) Si $A \subset B$ entonces $A’ \subset B’$
b) $(A \cup B)’= A’ \cap B’$
c) $(A \cap B)’= A’ \cup B’$
5.- Sea $A$ un subconjunto de $\mathbb{R}^n$ Prueba que: Si $B \subset A$ y $B$ es abierto, entonces $B \subset int(A)$ (es decir, de los conjuntos abiertos que están contenidos en $A$, $int(A)$ es el más «grande»).
Enlaces
El siguiente enlace muestra un código en python sobre el Conjunto de Cantor.
Te invitamos a reflexionar sobre la topología del mismo, el cual, se construye de la siguiente manera:
-Empieza con el intervalo [0,1].
-Divide el segmento en tres partes.
-Elimina el tercio central.
-Repite el proceso recursivamente.
-Cada iteración se dibuja más abajo para visualizar el proceso.
$\textcolor{Red}{\textbf{Extremos Restringidos (Multiplicadores de Lagrange)}}$
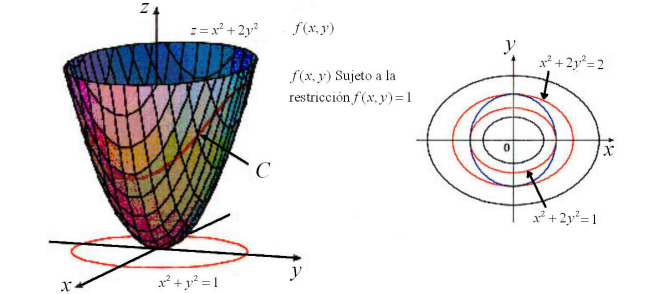
Supongase que se quieren hallar los valores extremos (máximo ó mínimo) de una función $f(x,y)$ sujeta a la restircción $x^2+y^2=1$; esto es, que $(x,y)$ está en el circulo unitario. Con mayor generalidad, podemos necesitar maximizar o minimizar $f(x,y)$ sujeta a la condición adicional de que $(x,y)$ también satisfaga una ecuación $g(x,y)=c$ donde $g$ es alguna función y $c$ es una constante. En el ejemplo $g(x,y)=x^2+y^2$ y $c=1$]. El conjunto de dichas $(x,y)$ es un conjunto de nivel de $g$.
En general, sean $f:u\subset \mathbb{R}^n\rightarrow \mathbb{R}$ y $g: u\subset \mathbb{R}^n\rightarrow \mathbb{R}$ funciones $C^1$ dadas, y sea $S$ el conjunto de nivel de $g$ con valor $c$. Recordar que el conjunto de nivel son los puntos $x\in \mathbb{R}^n$ con $g(x)=c$] Cuando $f$ se restringe a $S$, de nuevo tenemos el concepto de máximos locales o mínimos locales de $f$ (extremos locales), y un máximo (valor mayor) o un minimo absoluto (valor menor) debe ser un extremo local.
$\textbf{Teorema.- Método de los multiplicadores de lagrange.}$ Sean $f:u\subset \mathbb{R}^n\rightarrow \mathbb{R}$ y $g: u\subset \mathbb{R}^n\rightarrow \mathbb{R}$ funciones $C^1$ con valores reales dados. Sean $x_0 \in u$ y $g(x_0)=c$, y sea $S$ el conjunto de nivel de $g$ con valor $c$. Suponer $\nabla g(x_0)\neq 0$. Si $f|_s$ (f restringida a s) tiene un máximo o un mínimo local en $S$, en $x_0$, entonces existe un número real $\lambda$ tal que $\nabla f(x_0)=\lambda\nabla g(x_0)$.
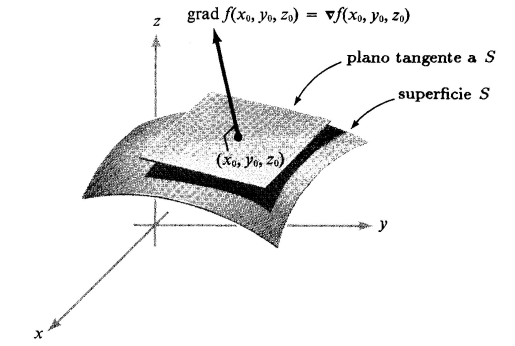
$Demostrción$ Para $n=3$ el espacio tangente o plano tangente de $S$ en $x_0$ es el espacio ortogonal a $\nabla g(x_0)$ y para $n$ arbitraria podemos dar la misma definición de espacio tangente de $S$ en $x_0$. Esta definición se puede motivar al considerar tangentes a trayectorias $c(t)$ que estan en $s$, como sigue: si $c(t)$ es una trayectoria en $S$ y $c(0)=x_0$, entonces $c'(0)$ es un vector tangente a $S$ en $x_0$, pero $$\frac{dg(c(t))}{dt}=\frac{d}{dt}(c)=0$$ Por otro lado usando regla de la cadena $$\left.\frac{d}{dt}g(c(t))\right|_{t=0}=\nabla g(x_0)\cdot c'(0)$$ de manera que $\nabla g(x_0)\cdot c'(0)=0$, esto es, $c'(0)$ es ortogonal a $\nabla g(x_0)$.
Si $f|s$ tiene un máximo en $x_0$, entonces $f(c(t))$ tiene un máximo en $t=0$. Por cálculo de una variable, $\displaystyle\left.\frac{df(c(t))}{dt}\right|{t=0}=0$. Entonces por regla de la cadena $$0=\displaystyle\left.\frac{df(c(t))}{dt}\right|_{t=0}=\nabla f(x_0)\cdot c'(0)$$ Asi, $\nabla f(x_0)$ es perpendicular a la tangente de toda curva en $S$ y entonces tambien es perpendicular al espacio tangente completo de $S$ en $x_0$. Como el espacio perpendicular a este espacio tangente es una recta, $\nabla f(x_0)$ y $\nabla g(x_0)$ son paralelos. Como $\nabla g(x_0)\neq 0$, se deduce que $\nabla f(x_0)$ es multiplo de $\nabla g(x_0)$.
$\textbf{Corolario.}$ Si $f$ al restringirse a una superficie $S$, tiene un máximo o un mínimo local en $x_0$, entonces $\nabla f(x_0)$ es perpendicular a $S$ en $x_0$.La geometria de los valores extremos restringidos.
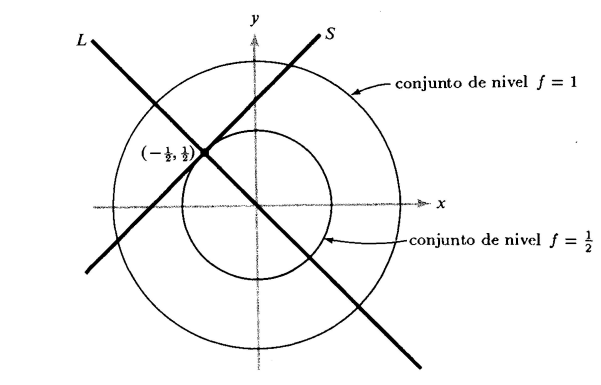
$\textbf{Ejemplo.}$ Sea $S\subset\mathbb{R}^2$ la recta que pasa por $(-1,0)$ inclinada a $45^{o}$, y sea $f:\mathbb{R}^2 \rightarrow \mathbb{R}$ daa asi $f(x,y)=x^2+y^2$. Hallar los extremos de $f|_s$.
$Solución.$ Aqui $S=\left\{(x,y) | y-x-1=0 \right\}$ y por lo tanto hacemos $g(x,y)=-y-x-1$ y $c=0$. Tenemos $\nabla g(x,y)=-i+j \neq 0$. Los extremos relativos de $f|_s$ deben hallarse entre los puntos en que $\nabla f$ es ortogonal a $S$, esto es, inclinada a $-45^{o}$. Pero $\nabla f (x,y)=(2x.2y)$, que tiene la pendiente deseada sólo cuando $x=-y$, o cuando $(x,y)$ está sobre la recta L, que pasa por el origen inlinada a $-45^{o}$. Esto puede suceder en el conjunto $S$ sólo para el unico punto en el que se intersecan L y S. Al referirnos a las curvas de nivel de $f$ se indica que este punto $(-\frac{1}{1},\frac{1}{2})$ es un mínimo relativo de $f|_s$ (Pero no de $f$).
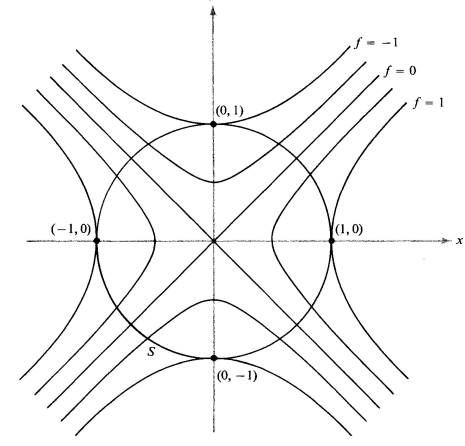
$\textbf{Ejemplo.}$ Sea $f:\mathbb{R}^2\rightarrow \mathbb{R}$ dada asi $f(x,y)=x^2-y^2$ y sea $S$ el círculo de radio 1 alrededor del origen. Hallar los extremos de $f|_s$.
$Solución.$ El conjunto $S$ es la curva de nivel para $g$ con valor $t$. Donde $g:\mathbb{R}^2\rightarrow \mathbb{R}$, $(x,y) \rightarrow x^2+y^2$. La condición de que $\nabla f=\lambda \nabla g$ en $x_0$, es decir que $\nabla f$ y $\nabla g$ son pararlelos en $x_0$, es la misma que las curvas de nivel sean tangentes en $x_0$. Asi los puntos extremos de $f |_s$ son $(0,\pm 1)$ y $(\pm1,0)$. Evaluando $f$ hallamos que $(0,\pm 1)$ son mínimos y $(\pm1,0)$ son máximos. Usando Multiplicadores de lagrange $\nabla f(x,y)=(2x,2y)$ y $\nabla g(x,y)=(2x,2y)$\ $\therefore$ \quad $(2x,-2y)=\lambda(2x,2y)$ cuya solución es $(0,\pm 1)$, $(\pm1,0)$.
$\textbf{Ejemplo.}$ Maximizar la función $f(x,y,z)=x+z$ sujeta a la restricción $x^2+y^2+z^2=1$
$Solución.$ Buscamos $\lambda$ y $(x,y,z)$ tales que $1=2x\lambda$, $0=2y\lambda$ y $1=2z\lambda$ $x^2+y^2+z^2=1$ la solución es $(\frac{1}{\sqrt{2}},0,\frac{1} {\sqrt{2}})$, $(-\frac{1}{\sqrt{2}},0,-\frac{1}{\sqrt{2}})$ comprobando los valores de $f$ en estos puntos podemos ver que el primer punto produce el máximo de $f$ y el segundo el mínimo.
$\textbf{Ejemplo.}$ Hallar los puntos extremos de $f(x,y,z)=x+y+z$ sujeto a las dos condiciones $x^2+y^2=2$ y $x+z=1$
$Solución.$ Aquí hay dos restricciones $g_1=(x,y,z)=x^2+y^2-2=0$ $g_2(x,y,z)=x+z-1=0$ asi, debemos encontrar $x,y,z,\lambda_1$ y $\lambda_2$ tales que $$\nabla f(x,y,z)=\lambda_1 \nabla g (x,y,z)+ \lambda_2 \nabla g_2(x,y,z)$$ $$g_1(x,y,z)=0 \quad y \quad g_2(x,y,z)=0$$ Calculando gradientes e igualando componentes, obtenemos

 El siguiente enlace muestra un código en python sobre el Conjunto de Cantor.
El siguiente enlace muestra un código en python sobre el Conjunto de Cantor.