Diferenciabilidad de Funciones de $\mathbb{R}^{2}\rightarrow \mathbb{R}$
Introducción
En funciones de varias variables la continuidad significa que no hay “saltos” en la gráfica: puedes acercarte a un punto desde cualquier dirección y el valor de la función coincide, sin embargo, hay que verificar esto para todas las direcciones posibles hacia el punto. Más aún, diremos que la función es diferenciable si se puede aproximar localmente por un plano tangente.
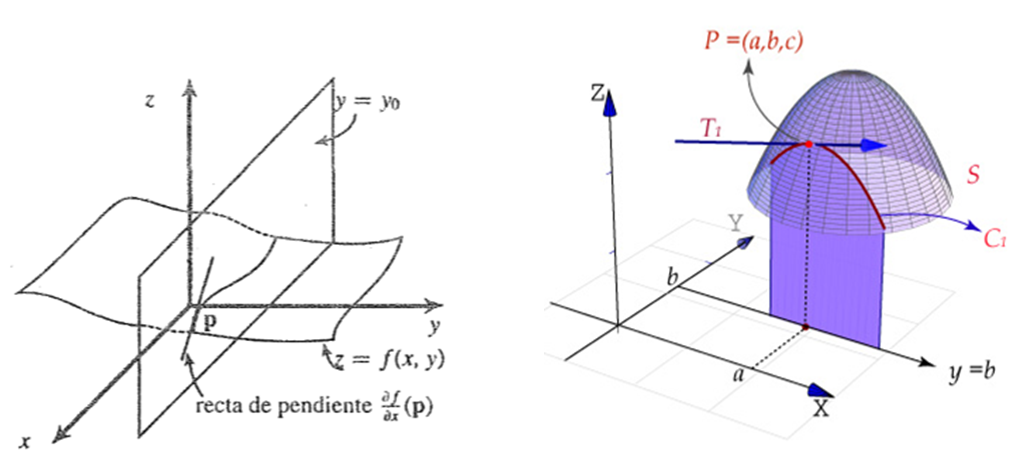
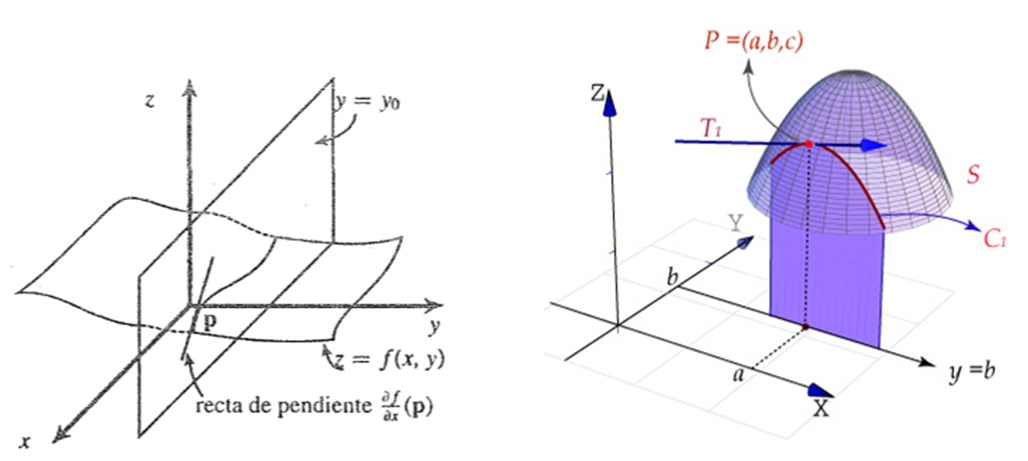
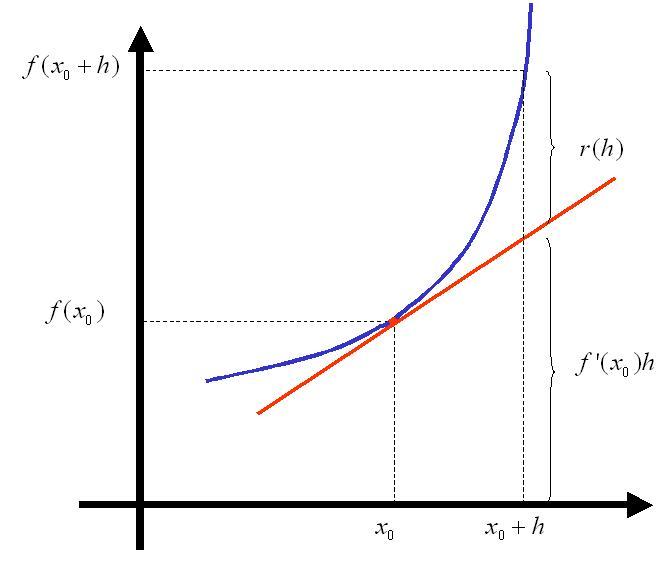
Definición. Sea $A\subset\mathbb{R}^{2}$, un abierto, $f:A\rightarrow\mathbb{R}$ y $(x_{0},y_{0})\in A$. Se dice que f es diferenciable en $(x_{0},y_{0})$ si existen las derivadas parciales $\displaystyle{\frac{\partial f}{\partial x}(x_{0},y_{0}),~~\frac{\partial f}{\partial y}}(x_{0},y_{0})$ tal que
$$f((x_{0},y_{0})+(h_{1},h_{2}))=f(x_{0},y_{0})+\frac{\partial f}{\partial x}(x_{0},y_{0})h_{1}+\frac{\partial f}{\partial y}(x_{0},y_{0})h_{2}+r(h_{1},h_{2})$$donde
$$\lim_{(h_{1},h_{2})\rightarrow(0,0)}\frac{r(h_{1},h_{2})}{|(h_{1},h_{2})|}=0$$
Diferenciabilidad implica continuidad de Funciones de $\mathbb{R}^{2}\rightarrow \mathbb{R}$
Teorema 1. Si la función $f:A\subset\mathbb{R}^{2}\rightarrow \mathbb{R}$ definida en $A$ de $\mathbb{R}^{2}$, es diferenciable en el ´punto $p=(x_{0},y_{0})\in A$, entonces es continua en ese punto.
Demostración. Si f es diferenciable en el ´punto $p=(x_{0},y_{0})\in A$ se tiene
$$f((x_{0},y_{0})+(h_{1},h_{2}))=f(x_{0},y_{0})+\frac{\partial f}{\partial x}(x_{0},y_{0})h_{1}+\frac{\partial f}{\partial y}(x_{0},y_{0})h_{2}+r(h_{1},h_{2})$$
tomando limite se tiene
$$\lim_{(h_{1},h_{2})\rightarrow(0,0)}f((x_{0},y_{0})+(h_{1},h_{2}))=\lim_{(h_{1},h_{2})\rightarrow(0,0)}f(x_{0},y_{0})+\cancel{\frac{\partial f}{\partial x}(x_{0},y_{0})h_{1}}+\cancel{\frac{\partial f}{\partial y}(x_{0},y_{0})h_{2}}+\cancel{r(h_{1},h_{2})}$$
se tiene entonces que
$$\lim_{(h_{1},h_{2})\rightarrow(0,0)}f((x_{0},y_{0})+(h_{1},h_{2}))=f(x_{0},y_{0})$$
por lo que f es continua en $(x_{0},y_{0})$
Aplicacion del Teorema del Valor Medio de Funciones de $\mathbb{R}^{2}\rightarrow \mathbb{R}$
Teorema 2. Suponga que $f:A\subset\mathbb{R}^{2}\rightarrow\mathbb{R}$ es tal que
$$\left|\frac{\partial f}{\partial x}(x_{0},y_{0})\right|\leq M$$ y $$\left|\frac{\partial f}{\partial x}(x_{0},y_{0})\right|\leq M$$
donde $M$ no depende de $x,y$ entonces $f$ es continua en $A$.
Demostración. Sean $(x_{0},y_{0}),(x_{0}+h_{1},y_{0}+h_{2})\in A$ tenemos entonces que $$f(x_{0}+h_{1},y_{0}+h_{2})-f(x_{0},y_{0})=f(x_{0}+h_{1},y_{0}+h_{2})\textcolor{Red}{-f(x_{0}+h_{1},y_{0})+f(x_{0}+h_{1},y_{0})}-f(x_{0},y_{0})$$ Aplicando teorema del valor medio se tiene que existen $\xi_{1},\in\ (x_{0},x_{0}+h_{1})$,$\xi_{2}\in(y_{0},y_{0}+h_{2})$ tal que $$f(x_{0}+h_{1},y_{0}+h_{2})\textcolor{Red}{-f(x_{0}+h_{1},y_{0})}=\frac{\partial f}{\partial y}(x_{0}+h_{1},\xi_{2})h_{2}$$ $$\textcolor{Red}{f(x_{0}+h_{1},y_{0})}-f(x_{0},y_{0})=\frac{\partial f}{\partial x}(\xi_{1},y_{0}+h_{2})h_{1}$$ por lo tanto $$\left|f(x_{0}+h_{1},y_{0}+h_{2})-f(x_{0},y_{0})\right|=\left|\left(\frac{\partial f}{\partial y}(x_{0}+h_{1},\xi_{2})h_{2}\right)+\left(\frac{\partial f}{\partial x}(\xi_{1},y_{0}+h_{2})h_{1}\right)\right|\leq $$ $$\left|\left(\frac{\partial f}{\partial y}(x_{0}+h_{1},\xi_{2})\right)\right||h_{2}|+\left|\left(\frac{\partial f}{\partial x}(\xi_{1},y_{0}+h_{2}\right)\right|)|h_{1}|\leq M(|h_{2}|+|h_{1}|)$$ si tenemos que $\displaystyle{|(h_{1},h_{2})|}<\delta$ entonces $$M(|h_{2}|+|h_{1}|)<2M\delta~\therefore~~~\epsilon=2M\delta\Rightarrow \delta=\frac{\epsilon}{2M}$$
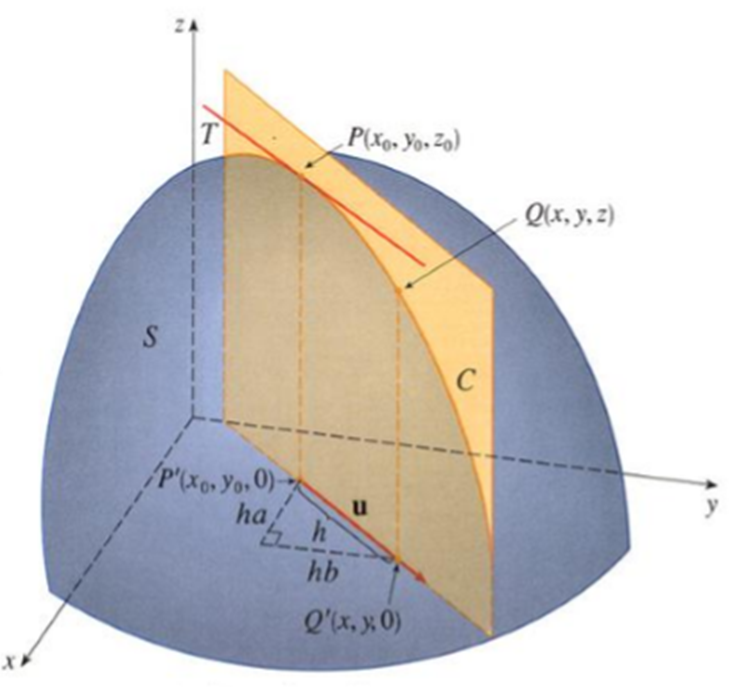
Diferenciabilidad y Derivadas Direccionales
Teorema 3. Si $f:\mathbb{R}^{n}\rightarrow \mathbb{R}$ es una función diferenciable en $x_{0}$ en la dirección del vector unitario u entonces
$$\frac{\partial f}{\partial u}(x_{0})=\sum_{i=1}^{n}\frac{\partial~f}{\partial x_{i}}\cdot u_{i}$$
Demostración. Sea $u\in\mathbb{R}^{n}$ tal que $u\neq0$ y $|u|=1$ como $f$ es diferenciable en $x_{0}$, se tiene que
$$f(x_{0}+h)-f(x_{0})=\sum_{i=1}^{n}\frac{\partial f}{\partial x_{i}}(x_{0})h_{i}+r(h)$$satisface
$$\lim_{(h)\rightarrow 0}\frac{r(h)}{|(h)|}=0$$
tomando $h=tu$ se tiene $|h|=|tu|=|t||u|=|t|$\
se tiene entonces
$$f(x_{0}+t(u))-f(x_{0})=\sum_{i=1}^{n}\frac{\partial f}{\partial x_{i}}(x_{0})tu_{i}+r(tu)$$
tenemos entonces
$$\lim_{t\rightarrow0}\frac{f(x_{0}+t(u))-f(x_{0})}{t}=\sum_{i=1}^{n}\frac{\partial f}{\partial x_{i}}(x_{0})u_{i}+\cancel{\lim_{t\rightarrow0}r(tu)}$$
es decir
$$\frac{\partial f}{\partial u}(x_{0})=\sum_{i=1}^{n}\frac{\partial f}{\partial x_{i}}(x_{0})u_{i}$$ $\square$
Ejemplo. Halle la derivada direccional de $f(x,y)=\ln(x^{2}+y^{3})$ en el punto $(1,-3)$ en la dirección $(2,-3)$
Solución. En este caso
$$u=(2,-3)~\Rightarrow~|u|=\sqrt{13}~\rightarrow~\frac{u}{|u|}=\left(\frac{2}{\sqrt{13}},\frac{-3}{\sqrt{13}}\right)$$
$$\frac{\partial f}{\partial x}(1,-3)=\frac{2x}{x^{2}+y^{3}}\left|_{(1,-3)}\right.=\frac{-2}{26}$$
$$\frac{\partial f}{\partial y}(1,-3)=\frac{3y^{2}}{x^{2}+y^{3}}\left|_{(1,-3)}\right.=\frac{-27}{26}$$
por lo tanto
$$D_{\left(\frac{2}{\sqrt{13}},\frac{-3}{\sqrt{13}}\right)}f\left(1,-3\right)=\left(\frac{-2}{26}\right)\cdot\left(\frac{2}{\sqrt{13}}\right)+\left(\frac{-27}{26}\right)\cdot \left(\frac{-3}{\sqrt{13}}\right)=\frac{77\sqrt{13}}{338}$$
El Gradiente
Sea $f:A\subset \mathbb{R}^{n}\rightarrow \mathbb{R}$ una función diferenciable en $x_{0}\in A$. Entonces el vector cuyas componentes
son las derivadas parciales de f en $x_{0}$ se le denomina Vector Gradiente
$$\left(\frac{\partial f}{\partial x_{1}}(x_{0}),\frac{\partial f}{\partial x_{2}}(x_{0}),…,\frac{\partial f}{\partial x_{n}}(x_{0}),\right)$$
y se le denota por $\nabla f$.
En el caso particular $n=2$ se tiene
$$\nabla f(x_{0})=\left(\frac{\partial f}{\partial x}(x_{0}),\frac{\partial f}{\partial y}(x_{0})\right)$$
En el caso particular $n=3$ se tiene
$$\nabla f(x_{0})=\left(\frac{\partial f}{\partial x}(x_{0}),\frac{\partial f}{\partial y}(x_{0}),\frac{\partial f}{\partial z}(x_{0})\right)$$
Ejemplo. Calcular $\nabla f$ para $f(x,y)=x^{2}y+y^{3}$
Solución. En este caso
$$\nabla f(x,y)=\left(2xy,x^{2}+3y^{2}\right)$$
Teorema 4. Si $f:\mathbb{R}^{2}\rightarrow \mathbb{R}$ es una función diferenciable en $(x_{0},y_{0})$ en la dirección del vector unitario u entonces
$$\frac{\partial f}{\partial u}(x_{0},y_{0})=\nabla f(x_{0},y_{0})\cdot u$$
Sea $u\in\mathbb{R}^{n}$ tal que $u\neq0$ y $|u|=1$ como $f$ es diferenciable en
$(x_{0},y_{0})$, se tiene que
$$f((x_{0},y_{0})+(h_{1},h_{2}))=f(x_{0},y_{0})+\frac{\partial f}{\partial x}(x_{0},y_{0})h_{1}+\frac{\partial f}{\partial y}(x_{0},y_{0})h_{2}+r(h_{1},h_{2})$$
satisface
$$\lim_{(h_{1},h_{2})\rightarrow(0,0)}\frac{r(h_{1},h_{2})}{|(h_{1},h_{2})|}=0$$
tomando $h=tu$ se tiene $|h|=|(h_{1},h_{2})|=|tu|=|t||u|=|t|$
se tiene entonces
$$f((x_{0},y_{0})+t(u))=f(x_{0},y_{0})+\frac{\partial f}{\partial x}(x_{0},y_{0})tu_{1}+\frac{\partial f}{\partial y}(x_{0},y_{0})tu_{2}+r(tu_{1},ru_{2})$$
y también
$$\frac{r(h_{1},h_{2})}{|(h_{1},h_{2})|}=\frac{r(tu_{1},ru_{2})}{|tu|}=\frac{r(tu_{1},ru_{2})}{|t||u|}=\frac{r(tu_{1},ru_{2})}{|t|}$$
tenemos entonces
$$\lim_{t\rightarrow0}\frac{r(tu_{1},ru_{2})}{|t|}=\lim_{t\rightarrow0}\frac{f((x_{0},y_{0})+t(u))-f(x_{0},y_{0})}{|t|}-\frac{\frac{\partial f}{\partial x}(x_{0},y_{0})tu_{1}}{|t|}-\frac{\frac{\partial f}{\partial y}(x_{0},y_{0})tu_{2}}{|t|}$$
es decir
$$0=\frac{\partial f}{\partial u}(x_{0},y_{0})-\frac{\partial f}{\partial x}(x_{0},y_{0})u_{1}-\frac{\partial f}{\partial y}(x_{0},y_{0})u_{2}$$
y en consecuencia
$$\frac{\partial f}{\partial u}(x_{0},y_{0})=\frac{\partial f}{\partial x}(x_{0},y_{0})u_{1}+\frac{\partial f}{\partial y}(x_{0},y_{0})u_{2}=\left(\frac{\partial f}{\partial x}(x_{0},y_{0},\frac{\partial f}{\partial y}(x_{0},y_{0}\right)\cdot\left(u_{1},u_{2}\right)=\nabla f(x_{0},y_{0})\cdot u$$ $\square$
Ejemplo. Halle la derivada direccional de $f(x,y)=\ln(x^{2}+y^{3})$ en el punto $(1,-3)$ en la dirección $(2,-3)$
Solución. En este caso
$$\frac{\partial f}{\partial x}(1,-3)=\frac{2x}{x^{2}+y^{3}}\left|_{(1,-3)}\right.=\frac{-2}{26}$$
$$\frac{\partial f}{\partial y}(1,-3)=\frac{3y^{2}}{x^{2}+y^{3}}\left|_{(1,-3)}\right.=\frac{-27}{26}$$
por lo tanto
$$\nabla f(1,-3)=\left(\frac{-2}{26},\frac{-27}{26}\right)\cdot \left(\frac{2}{\sqrt{13}},\frac{-3}{\sqrt{13}}\right)=\frac{77}{26\sqrt{13}}=\frac{77\sqrt{13}}{338}$$
Dirección de Mayor Crecimiento de una Función
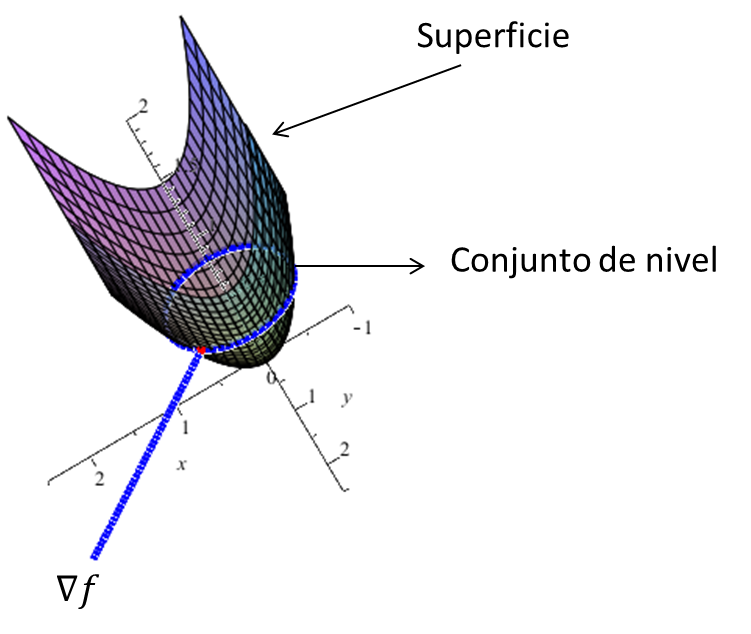
Teorema 5. Supongamos que $\nabla(f(x))\neq(0,0,0)$. Entonces $\nabla(f(x))$ apunta en la dirección a lo largo de la cual f crece más rápido.
Demostración. Si v es un vector unitario, la razón de
cambio de f en la dirección v está dada por $\nabla(f(x))\cdot v$ y
$\nabla(f(x)) \cdot v$ = $|\nabla{f(x)}|~|v|\cos\Theta$ = $|\nabla{f(x)}|\cos\Theta$,
donde $\Theta$ es el ángulo entre $\nabla{f}$, $v$. Este es máximo cuando $\Theta~=~0$ y esto ocurre cuando $v$, $~\nabla{f}$ son paralelos. En otras palabras, si queremos movernos en una dirección en la cual $f$ va a crecer más rápidamente, debemos proceder en la dirección $\nabla{f(x)}$. En forma análoga, si queremos movernos en la dirección en la cual $f$ decrece más rápido, habremos de proceder
en la dirección $-\nabla{f}$.
Ejemplo. Encontrar la dirección de rapido crecimiento en $(1,1,1)$ para $\displaystyle{f(x,y,z)=\frac{1}{\sqrt{x^{2}+y^{2}+z^{2}}}}$
Solución. En este caso
$$\nabla f(1,1,1)=\left(\frac{\partial \left(\frac{1}{\sqrt{x^{2}+y^{2}+z^{2}}}\right)}{\partial x},\frac{\partial \left(\frac{1}{\sqrt{x^{2}+y^{2}+z^{2}}}\right)}{\partial y},\frac{\partial \left(\frac{1}{\sqrt{x^{2}+y^{2}+z^{2}}}\right)}{\partial z}\right)\left|_{(1,1,1)}\right.=$$
$$\left(-\frac{x}{\sqrt{x^{2}+y^{2}+z^{2}}},-\frac{y}{\sqrt{x^{2}+y^{2}+z^{2}}},-\frac{z}{\sqrt{x^{2}+y^{2}+z^{2}}}\right)\left|_{(1,1,1)}\right.=-\frac{1}{3\sqrt{3}}\left(1,1,1\right)$$
Podemos tomar
$$u=\frac{\nabla f}{|\nabla f|}$$
en este caso
$$u=\frac{-\frac{1}{3\sqrt{3}}\left(1,1,1\right)}{\frac{1}{3}}=\left(-\frac{1}{\sqrt{3}},-\frac{1}{\sqrt{3}},-\frac{1}{\sqrt{3}}\right)$$
Puntos Estacionarios
Definición. Sea $f:\Omega\subset \mathbb{R}^{n} \rightarrow \mathbb{R}$ diferenciable, a los puntos $x\in \Omega$ tales que $\nabla f(x)=0$ se les llama puntos críticos (o punto estacionario) de la función.
Ejemplo. Sea $f:\mathbb{R}^{2}\rightarrow\mathbb{R}$ dada por $f(x,y)=x^{2}-y^{2}$ hallar los puntos críticos de $f$
Solución. Se tiene que $\nabla f(x)=(2x, 2y)$ $\hspace{0.5cm}$ $\nabla f(x)=0\Leftrightarrow(2x, 2y)=(0,0)\Leftrightarrow 2x=0$ y $2y=0\Leftrightarrow x=0$ y $y=0$ \hspace{0.5cm} $\therefore$ $(0,0)$ es el único punto crítico de $f$.
Ejemplo. Que condición se debe satisfacer para que la función $f:\mathbb{R}^{2}\rightarrow\mathbb{R}$ dada por $f(x,y)=ax^{2}+2bxy+cy^{2}+dx-ey+f$ tenga un punto crítico
$\nabla f=(2ax+2by+d, 2bx+2cy-e)$ entonces
$\nabla f=0\Leftrightarrow 2ax+2by+d=0$ y $2bx+2cy-e=0$
$\Rightarrow$ $ 2ax+2by=-d$ y $2bx+2cy=e$ se necesita que
$\Rightarrow$ $2a(2c)-(2b)^{2}\neq 0$ $\therefore$ $ac-b^{2}\neq 0$
Mas adelante
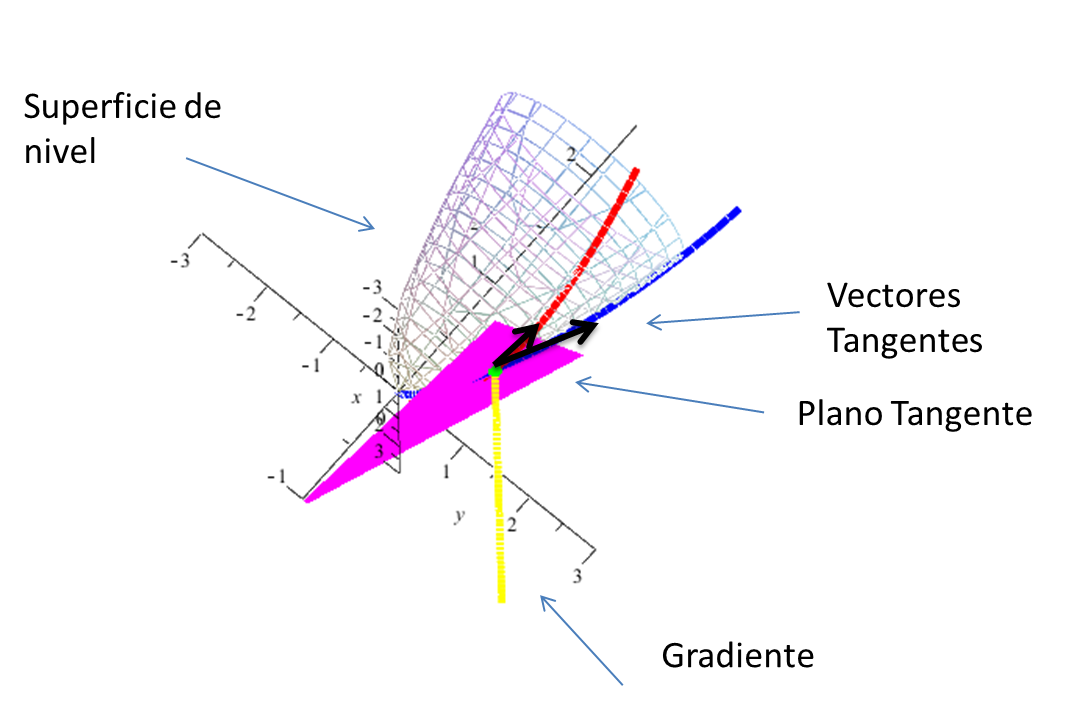
En la siguiente entrada veremos como la regla de la cadena representa una herramienta del cálculo que permite derivar funciones compuestas. Si una variable depende de otra, y esa a su vez depende de otra, la derivada de la función final se obtiene multiplicando las derivadas intermedias. También veremos cómo gracias a que el gradiente representa la dirección de máximo crecimiento nos ayuda a definir el plano tangente de una función en un punto dado.
Tarea Moral
1.- Sea la función $f:\mathbb{R^2}\rightarrow \mathbb{R}$ con $f:xe^y$ calcula: $\nabla f=(\frac{\partial{f}}{\partial{x}}, \frac{\partial{f}}{\partial{y}}, \frac{\partial{f}}{\partial{z}})$
2.- Sea $f(x,y)=x^2+y+3y^2$ calcula la derivada direccional en el punto $(2,-4)$ en la dirección $(3,2)$.
3.- Evalua el gradiente de $f(x,y,z)=log(x^2+y^2+z^2)$ en $(1,0,1)$
4.- Sean $f,g:\mathbb{R}^2\rightarrow \mathbb{R}$ prueba que $\nabla(fg)=f \nabla g+ \nabla f g$
5.- Sea $f(x,y,z)=x^2e^{-yz}$ calcula la derivada direccional de $f$ en la dirección del vector unitario $v=(\dfrac{1}{3},\dfrac{1}{3},\dfrac{1}{3})$
Enlaces
 El siguiente enlace contiene una calculadora en python que te va a permitir saber el valor de la derivada direccional de una función de dos dimensiones en un punto y una dirección en específico.
El siguiente enlace contiene una calculadora en python que te va a permitir saber el valor de la derivada direccional de una función de dos dimensiones en un punto y una dirección en específico.
https://colab.research.google.com/drive/19EHSU3DyMZgHt2a2IZtO6vToMrCJVeHC?usp=sharing