Introducción
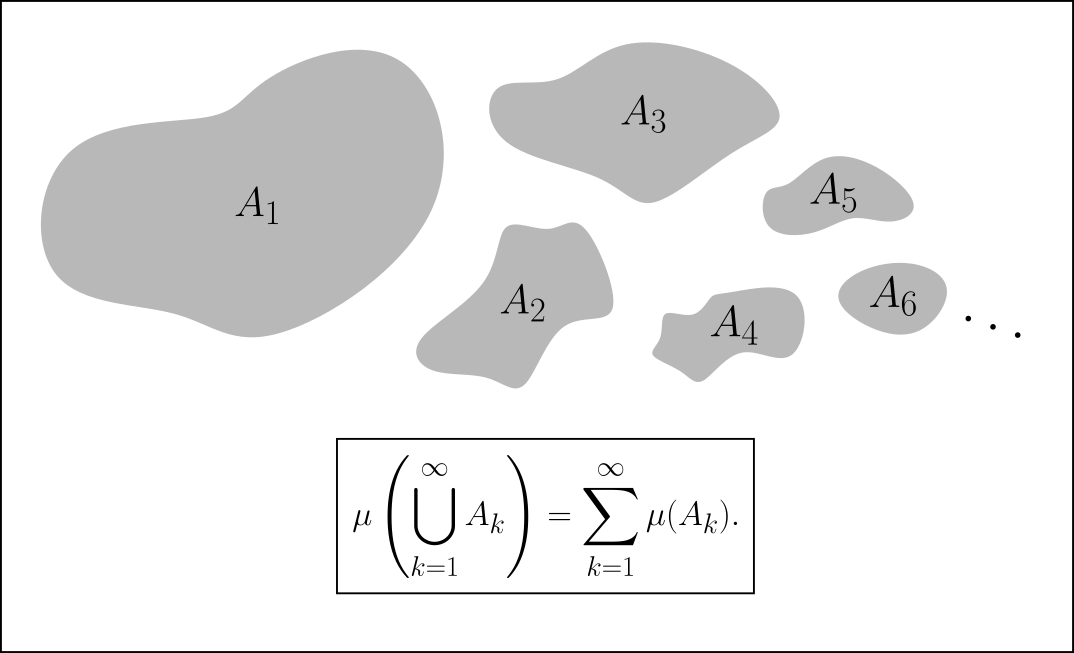
En la entrada pasada generalizamos el concepto de medida para espacios abstractos. Ahora veremos como extender el concepto de integración sobre un espacio de medida general y analizaremos un par de ejemplos clásicas.
Un comentario importante
La mayoría de definiciones y resultados que hemos establecido hasta ahora para la medida e integral de Lebesgue son válidos también para espacios de medida en general. La razón de esto es que las propiedades de la medida de Lebesgue en $\mathbb{R}^n$ son, por definición, las mismas que las de cualquier medida sobre un espacio abstracto $(X,\mathcal{M},\mu)$. Por ésta razón omitiremos la mayoría de pruebas pues, esencialmente, ya las hemos hecho. En prácticamente todos los casos basta reemplazar dentro de los argumentos las menciones de $(\mathbb{R}^n,\mathcal{L}_n,\lambda)$ por $(X,\mathcal{M},\mu)$ respectivamente.
La única excepción son los teoremas de caracterización de conjuntos medibles utilizados en la prueba de los teoremas de cambio de variable y Fubini. Estos resultados destacan la relación que existe entre la medida de Lebesgue y la topología de $\mathbb{R}^n$.
Integración en espacios de medida
Para definir la integral en espacios de medida general, podemos seguir el mismo órden que usamos para definir la integral en $\mathbb{R}^n$. En lo que sigue $(X,\mathcal{M},\mu)$ denotará un espacio de medida (salvo que se especifique lo contrario). Por simplicidad, cuando sea claro del contexto nos referiremos a las funciones $\mathcal{M}$-medibles simplemente como medibles.
Recordemos primero la definición de funciones simples:
Definición. Decimos que $s:X\to [-\infty, \infty]$ es una función simple si toma solamente una cantidad finita de valores.
Definición. Dado $X$ un conjunto y $\mathcal{M}$ una $\sigma$-álgebra sobre $X$, denotamos por $S_{\mathcal{M}}$ (o simplemente $S$) al conjunto de funciones simples y $\mathcal{M}$-medibles $s$, tales que $0\leq s <\infty$.
Observemos que toda función $s\in S_{\mathcal{M}}$. Se puede escribir como $$s=\sum_{k=1}^{m}\alpha_k\chi_{E_k},$$ Donde $0\leq \alpha_k <\infty$ y los conjuntos $E_k$ son $\mathcal{M}$-medibles y ajenos.
Una de las propiedades más importantes que probamos es que cualquier función medible se puede aproximar por funciones simples:
Teorema (Aproximación mediante funciones simples). Supongamos que $f:X\to [-\infty, \infty]$ es $\mathcal{M}$ medible. Entonces existe una sucesión $s_1,s_2,\dots$ de funciones simples $\mathcal{M}$-medibles tales que $$\lim_{k\to \infty} s_k = f.$$ Si $f\geq 0$, podemos tomar la sucesión de modo que $0\leq s_1\leq s_2\ \leq \dots$ . O más generalmente, podemos tomar la sucesión de modo que $|s_1|\leq \ |s_2|\leq \dots$ . Si $f$ es acotada, podemos hacer que la convergencia sea uniforme.
$\square$
Cuando sea claro del contexto, denotaremos a $S_{\mathcal{M}}$ como $S$.
Definición. Dado un espacio de medida $(X,\mathcal{M},\mu)$ y una función simple $s=\sum_{k=1}^{m}\alpha_k\chi_{E_k}\in S_{\mathcal{M}}$, definimos su integral como:
$$\int_X s \ \mathrm{d}\mu=\sum_{k=1}^{m}\alpha_k \mu(E_k).$$
Definición. Dada una función $\mathcal{M}$-medible no negativa $f:X\to[0,\infty]$, definimos su integral como:
$$\int f_X \ \mathrm{d}\mu=\sup\left\{ \int_X s \ \mathrm{d}\mu \ | \ s\leq f, \ s\in S \right\}.$$
Otras formas comunes para referirse a la integral son:
$$\int f \ \mathrm{d}\mu, \ \ \ \int f(x) \ \mathrm{d}\mu(x), \ \ \ \int_X \mathrm{d}\mu \ f, \ \ \ \int_X \mathrm{d}\mu(x) \ f(x).$$
Proposición (Propiedades de la integral de una función no negativa). Sean $f,g:X\to [0,\infty]$ funciones medibles. Entonces:
- La integral de cualquier función medible no negativa $f$ está bien definida.
- $$0\leq \int f \ \mathrm{d}\mu \leq \infty.$$
- Si $0\leq c<\infty$ es una constante, $$\int cf \ \mathrm{d}\mu=c\int f \ \mathrm{d}\mu.$$
- Si $f\leq g$, entonces $$\int f \ \mathrm{d}\mu\leq \int g \ \mathrm{d}\mu.$$
- Si $\int f \ \mathrm{d}\mu=0$ Entonces $$\mu(\{ x \ | \ f(x)>0 \})=0.$$
- $$\int (f+g) \ \mathrm{d}\mu=\int f \ \mathrm{d}\mu+\int g \ \mathrm{d}\mu.$$
$\square$
También podemos dar versiones generales de los teoremas de convergencia para integrales. Nuevamente las demostraciones son idénticas al caso en $\mathbb{R^n}$ así que las omitimos.
Teorema (de convergencia monótona de Lebesgue). Sea $\{f_k \}_{k=1}^{\infty}$ una sucesión creciente de funciones medibles no negativas sobre $X$: $$0\leq f_1\leq f_2\leq f_3\leq \dots$$ Entonces $$\lim_{k\to \infty} \int f_k \ \mathrm{d}\mu=\int \left( \lim_{k\to \infty} f_k \right) \ \mathrm{d}\mu.$$
$\square$
Teorema (Lema de Fatou). Sean $f_1,f_2,f_3,\dots$ funciones medibles y no negativas. Entonces: $$\int\left( \liminf_{k\to \infty} f_k \right) \ \mathrm{d}\mu\leq \liminf_{k\to \infty} \int f_k \ \mathrm{d}\mu.$$
Similarmente, podemos definir la integral de funciones medibles más generales de manera análoga a la integral en $\mathbb{R}^n$.
$\square$
Definición. Sea $f:X\to [-\infty,\infty]$ una función medible, con parte positiva y negativa $f_+$ y $f_-$ respectivamente. Definimos la integral de $f$ como $$\int f \ \mathrm{d}\mu=\int f_+ \ \mathrm{d}\mu-\int f_- \ \mathrm{d}\mu.$$ Siempre que este número esté bien definido. Decimos que una función $f$ es integrable si:
$$\int f_+ \ \mathrm{d}\mu,\int f_- \ \mathrm{d}\mu<\infty.$$ Denotaremos la clase de funciones integrables como $L^1(X,\mathcal{M},\mu),L^1(X)$ o simplemente como $L^1$ si el espacio de medida es claro del contexto.
Proposición (Propiedades de la integral de funciones $L^1$). Sean $f,g:X\to \infty$ funciones en $L^1(X,\mathcal{M},\mu)$.
- (Desigualdad del triángulo). $$\left| \int f \ \mathrm{d}\mu\right|\leq \int |f| \ \mathrm{d}\mu.$$ Además $$f\in L^1 \ \ \iff \ \ |f|\in L^1.$$
- (Linealidad). Dados $a,b\in \mathbb{R}$ constantes $$\int (af+bg) \ \mathrm{d}\mu=a\int f \ \mathrm{d}\mu+b\int g \ \mathrm{d}\mu.$$
- Si $f\leq g$, entonces $$\int f \ \mathrm{d}\mu\leq \int g \ \mathrm{d}\mu.$$
$\square$
Teorema (de convergencia dominada). Sea $f_1,f_2,f_2,\dots$ una sucesión de funciones medibles sobre $X$ tales que $$\lim_{k\to \infty} f_k(x)$$ Existe para (c.t.p.) $x\in X$, y además existe una función $g\in L^1(X)$ tal que $$|f_k(x)|\leq g(x)$$ Para (c.t.p.) $x\in X$ y $k\in \mathbb{N}$. Entonces $f\in L^1(X)$ y $$\int \left(
\lim_{k\to \infty} f_k \right) \ \mathrm{d}\mu=\lim_{k\to \infty} \int f_k \ \mathrm{d}\mu.$$
$\square$
En el teorema pasado hacemos uso del concepto de «en casi todo punto». Éste es identico al caso en $\mathbb{R}^n$: Una propiedad se cumple «casi donde sea» o «en casi todo punto» (abreviado por c.t.p.) si el conjunto de puntos donde NO se cumple tal propiedad es de medida ($\mu$) cero. Naturalmente también hay versiones en casi todo punto de los teoremas de convergencia monótona y el Lema de Fatou pero omitimos su enunciado.
Al igual que antes, los conjuntos de medida cero no afectan el valor de la integral.
Proposición (insensibilidad de la integral). Sean $f,g:X\to[-\infty,\infty]$ funciones medibles tales que $\mu(\{ x \ | \ f(x)\neq g(x) \})=0$. Si $f\in L^1(X)$ $\implies$ $g\in L^1(X)$ con $$\int f \ \mathrm{d}\mu=\int g \ \mathrm{d}\mu.$$
$\square$
Al igual que en $\mathbb{R}^n$, podemos definir integrales sobre conjuntos $\mathcal{M}$-medibles:
Definición. Sea $f$ una función definida sobre un conjunto $\mathcal{M}$-medible $E$. Decimos que $f$ es medible sobre $E$ si $f\chi_E$ es $\mathcal{M}$-medible, o equivalentemente, si $f^{-1}(B)\in \mathcal{M}$ para cualquier conjunto de Borel $B$.
Definimos la integral de $f$ sobre $E$ (cuando tenga sentido) como: $$\int_E f \ \mathrm{d}\mu=\int f\cdot\chi_E \ \mathrm{d}\mu.$$
Diremos que $f\in L^1(E)$ si $f\cdot\chi_E\in L^1(X)$.
La integral sobre conjuntos tiene propiedades análogas a las de la integral sobre conjuntos de $\mathbb{R}^n$. Omitimos los detalles.
Algunos ejemplos típicos
Si bien la integral sobre un espacio de medida abstracto tiene propiedades análogas a las de la integral de Lebesgue en $\mathbb{R}^n$, ésta nos puede decir información muy diferente dependiendo del espacio sobre el que estemos trabajando. Veamos un ejemplo concreto: La integral respecto a la medida de conteo.
Ejemplo. Consideremos $(X,2^{X},\mu)$, donde $X$ es un conjunto finito o numerable y $\mu$ es la medida de conteo. Notemos que cualquier función $f:X\to[-\infty, \infty]$ es medible pues $f^{-1}([-\infty,t])\in 2^X$ para cualquier $t$.
Ahora, sea $f\geq 0$ una función no negativa. Como $X$ es a lo más numerable podemos escribir: $$f(y)=\sum_{x\in X}f(x)\chi_{\{ x\}}(y).$$ Aplicando el teorema de la convergencia monótona y linealidad:
$$ \int f \ \mathrm{d}\mu =\int \sum_{x\in X}f(x)\chi_{\{ x\}} \ \mathrm{d}\mu=\sum_{x\in X}\left( f(x) \int \chi_{\{ x\}} \ \mathrm{d}\mu\right)=\sum_{x\in X} f(x) \mu(\{ x\})$$ $$=\sum_{x\in X} f(x).$$ Pues la medida de cualquier conjunto unitario bajo la medida de conteo es $1$. Esto nos dice que la integral bajo la medida de conteo es simplemente la suma de los valores de la función.
Más generalmente, dada $f:X\to[-\infty,\infty]$, recordemos $f\in L^1(X)$ $\iff$ $|f|\in L^1(X)$. Como $$\int |f| \ \mathrm{d}\mu=\sum_{x\in X}|f(x)|,$$ Concluimos que $f\in L^1(X)$ si y sólo si la serie $\sum_{x\in X} f(x)$ converge absolutamente. En cuyo caso la integral resulta nuevamente: $$\int f \ \mathrm{d}\mu=\int f_+ \mathrm{d}\mu-\int f_- \mathrm{d}\mu=\sum_{x\in X} f_+(x)-\sum_{x\in X} f_-(x)=\sum_{x\in X} f(x).$$
La integral respecto a la medida de conteo sobre conjuntos no numerables se comporta de manera muy similar salvo ciertas restricciones sobre el «soporte» de las funciones (ver Tarea moral).
$\triangle$
Ejemplo. Dado $(X,\mathcal{M},\mu)$ un espacio de medida y $E\in \mathcal {M}$ un conjunto medible, definimos la $\sigma$-álgebra inducida sobre $E$ como $$\mathcal{M}_E=\{ F\cap E \ | \ F\in \mathcal{M} \}.$$ Definimos la medida inducida por $\mu$ sobre $E$ como $$\mu_E(A)=\mu(A) \ \ \ \ \ \ \forall A\in \mathcal{M}_E.$$ Es fácil ver que $(E,\mathcal{M}_E,\mu_E)$ forman un espacio de medida. Más aún, siempre que tenga sentido, se tiene que: $$\int_E f \ \mathrm{d}\mu=\int f \ \mathrm{d}\mu_E.$$ Es decir, la integral sobre un conjunto se puede pensar como la integral respecto a la medida inducida. La verificación de este hecho es de rutina y se queda como tarea moral.
$\triangle$
Ejemplo. En $\mathbb{R}^n$, la integración sobre la medida de Hausdorff $s$-dimensional $\mathcal{H}^s$ con $s<n$ entero, generaliza los conceptos de integral de línea y superficie a dominios y funciones mucho más generales.
$\triangle$
Más adelante…
Revisaremos brevemente algunas propiedades que nos ayudan a «clasificar» medidas y que son de gran importancia para establecer resultados más avanzados.
Tarea moral
- Sea $X$ un conjunto no numerable con la medida de conteo $\mu$ y $f:X \to [0,\infty]$. Demuestra que $$\int f \ \mathrm{d}\mu=\sum_{x\in\{ x | f(x)\neq 0 \}} f(x).$$ Si $\{x \ | \ f(x)\neq 0 \}$ es numerable y $$\int f \ \mathrm{d}\mu=\infty.$$ En otro caso.
- Sea $\delta_{x_0}$ la medida de Dirac en $x_0$ sobre $X$. Calcula $$\int f \ \mathrm{d}\delta_{x_0} .$$
- Con la notación del último ejemplo, demuestra que $$\int_E f \ \mathrm{d}\mu=\int f \ \mathrm{d}\mu_E.$$ [SUGERENCIA: Procede con el órden usual: función característica $\implies$ función simple $\implies$ función no negativa].