En esta entrada, continuaremos con el estudio de las cónicas, pero en esta ocasión, vamos a encontrar su centro y ejes, a partir de dos grupos de isometrías que ya son familiares para nosotros, las rotaciones y traslaciones y usando otro tema que ya ha sido estudiado con anterioridad, la equivalencia de polinomios y reducción de términos lineales y cuadráticos.
Encontrando el centro de las traslaciones
Para cualquier vector $h \in \mathbb R^2$, consideremos la traslación $g(x)=x+h$ y veamos cómo se escribe el polinomio $P \circ g$ con $P(x)=x*Ax+k*x+f$:
La pregunta ahora es, ¿hay una forma de encontrar el centro de la traslación g a partir de esta expresión? Lo que, por muy extraño que parezca, es cierto, pero, ¿cómo?
Enunciemos unos lemas que nos ayudarán a encontrar la respuesta a la pregunta anterior.
Lema 4.4: Dadas $A$ y $B$ dos matrices que se puedan multiplicar, se cumple que $(AB)^T=B^TA^T$
Lema 4.5: Si tenemos una matriz simétrica $A$ (recordemos que una matriz $A$ es simétrica si $A=A^T$), entonces, para todo par de vectores $x,y$ en $\mathbb R$, se cumple que $x*Ay=Ax*y$
Demostración
Sean $x,y$ vectores, recordemos que $x=x^T$ y que $y=y^T$, por esto y el lema anterior, tenemos que:
Donde $(2Ah+k)*x$ es la parte lineal de esta composición por lo que, si podemos encontrar una $h \in \mathbb R^2$ que cumpla que $2Ah+k=0$, entonces habremos encontrado una traslación que no contenga la parte lineal del polinomio. Si esta $h$ existe, es el centro de la traslación (en el caso de este capítulo, estaremos hablando de traslaciones de cónicas).
Lo anterior lo podemos resumir en el siguiente lema:
Lema 4.6: Sea $P(x)=x*Ax+k*x+f$ un polinomio cuadrático (es decir que $A=A^T$) tal que $det(A)\neq 0$. Si definimos $c:=-\frac{A^{-1}}{k}$, $c$ es el centro de la curva asociada al polinomio $P$, $C(P)$ donde:
\begin{equation}P(x+c)=x*Ax+P(c)\end{equation}
Como buena conclusión de este apartado, observa que las traslaciones afectan la parte lineal de los polinomios cuadráticos.
Encontrando los ejes de las rotaciones
Ahora considera la rotación $g(x)=Bx$ con $B$ en el general lineal de $\mathbb R^2$, es decir, $B \in Gl(2)$ y $P$ el polinomio cuadrático general. Entonces:
La pregunta en este caso es, ¿existe una forma de encontrar los ejes de la rotación a partir de esta expresión? La respuesta es sí.
A diferencia de las traslaciones, en las que se afectaba la parte lineal, para las rotaciones nos vamos a enfocar en la parte cuadrática. Debemos encontrar una manera de simplificar la expresión $B^TAB$.
Considera a $B$ como matriz ortogonal $(B \in O(2))$, esto implica que $B^TAB=B^{-1}AB$ que es la matriz que expresa la función $A$ en la base de las columnas de $B$.
Finalmente, toma a $u,v$ columnas de $B$ que forman una base ortonormal y que $A$ alarga estas columnas en factores $\lambda, \mu$, es decir, que $Au=\lambda u$ y $Av=\mu v$. Entonces, las siguientes igualdades se cumplen:
En la entrada anterior construimos un puente entre la intuición que tenemos de las circunferencias y el estudio formal que podemos hacer de ellas utilizando las herramientas de la geometría analítica. Ahora queremos ir más allá de las propiedades básicas del círculo, como lo son su centro y su radio, para abordar propiedades un poco más avanzadas; sus rectas tangentes y polares.
Veremos a lo largo de esta entrada cómo la ecuación vectorial de la circunferencia nos prueba su utilidad al abordar problemas geométricos tales como encontrar puntos de tangencia sobre una circunferencia, hacer demostraciones que involucren las secantes de un círculo, entre otros.
Líneas tangentes a un círculo
Antes de abordar el tema de las líneas tangentes a un círculo, mencionaremos brevemente un problema físico que nos puede motivar a estudiarlo. El problema de la polea consiste en encontrar la longitud de un cable que conecta a dos circunferencias de radio $r_1$ y $r_2$ que no se cruzan; cuyos centros están separados por una distancia $P$. Aunque sea un problema en apariencia sencillo su solución requiere de herramientas como líneas bitangentes, ángulos verticales y congruencia. Pese a que la su solución no es trivial, es un problema de ingeniería bastante importante, pues se usa en el diseño de aeroplanos, bicicletas, autos, etc. No escribiremos explícitamente la solución a este problema, por el momento sólo diremos que para resolverlo es fundamental utilizar el concepto de línea tangente.
Problema de la polea
Ahora que comentamos una motivación, empezaremos a discutir el concepto de línea tangente. Intuitivamente podemos pensar que las líneas tangentes son las que tocan a una circunferencia en uno solo de sus puntos. Esto tiene varias implicaciones; la primera de ellas es que podemos pensar en las tangentes como las normales a los radios (los segmentos del centro a sus puntos). Empezaremos proponiendo la definición de las líneas tangentes y haremos una discusión detallada de cada uno de los elementos de esta definición.
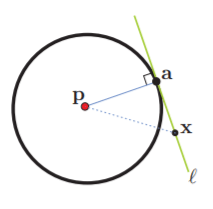
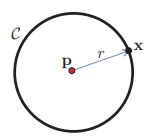
Definición. Si $\mathbf{a}$ es un punto del círculo $\mathcal{C}$ dado por la ecuación vectorial
entonces su línea tangente es la recta $\ell$ normal a $(\mathbf{a} – \mathbf{p})$ y que pasa por $\mathbf{a}$.
Esta definición tiene algunas implicaciones interesantes que para los elementos que la constituyen que vale la pena observar con detalle. La primera es que, puesto que $\mathbf{a}$ es el punto más cercano a $\mathbf{p}$ en esta recta, para cualquier otro punto $x \in \ell$ se tiene que $\mathrm{d}(\boldsymbol{x}, \mathbf{p})>\mathrm{r}$. Dicho de una forma más sencilla: cualquier otro punto que no sea el punto de tangencia estará alejado del centro del círculo una distancia mayor que el radio. Puedes observar la figura para convencerte de este hecho.
Línea tangete del círculo y punto de tangencia.
Continuando nuestra exploración de los elementos de la definición que acabamos de presentar, observa que el círculo $\mathcal{C}$ parte el plano en dos pedazos; el interior donde $\mathrm{d}(\boldsymbol{x}, \mathbf{p})<\mathrm{r}$, y el exterior donde $\mathrm{d}(\boldsymbol{x}, \mathbf{p})>\mathrm{r}$, de esta forma $\ell$ está contenida en el exterior salvo por el punto $a \in \mathcal{C}$.
Para obtener una expresión analítica de las líneas tangentes conviene recordar las herramientas vectoriales que fueron presentadas durante la primera unidad, te podrás dar cuenta que si utilizamos la forma de la ecuación normal de recta con los elementos de nuestra definición, podemos ver que la recta $\ell$ está dada por la ecuación
Esta forma de escribir la ecuación será importante en la siguiente sección cuando abordemos las rectas polares, sin embargo, antes de pasar a la siguiente sección hagamos un ejemplo sobre cómo encontrar la tangente de una circunferencia.
Ejemplo. Supongamos que tenemos un círculo con centro en $(4,-3)$ y radio $5$. Encuentre la línea de tangencia que pasa por el punto $(4,2)$.
Primero tenemos que verificar que el punto está dentro de la circunferencia. Si escribimos la ecuación cartesiana de nuestro círculo
y sustituimos el punto $(4,2)$. Podemos darnos cuenta que el punto sí está en la circunferencia. Como ya vimos que está sobre el círculo, sólo tenemos que sustituir en la expresión analítica de la línea tangente
Escrito en forma cartesiana, tenemos que la recta tangente a nuestra circunferencia a través de ese punto es $y=2$.
Como vimos en nuestro ejemplo, obtener la expresión analítica de la línea tangente a través de un punto es muy fácil si recordamos la definición vectorial. Para terminar esta sección utiliza el siguiente recuadro interactivo para explorar diferentes líneas tangentes de una circunferencia. Nota cómo el punto de tangencia siempre se encuentra en los «bordes» del círculo. ¿Podríamos generalizar vectorialmente el concepto de tangencia para puntos que no se encuentran sobre la circunferencia?
Líneas polares de un círculo
Para empezar nuestro estudio de las líneas polares de un círculo, recuerda el último desarrollo algebraico que hicimos en la sección anterior: ese en el cual sustituimos $\mathbf{a}$ en una de las instancias de $\mathbf{x}$ en la ecuación vectorial. Recuerda cómo en el caso de la línea tangente, consideramos que el punto $\mathbf{a}$ estaba sobre la circunferencia. Con esto en mente, estamos listos para dar una definición de línea polar.
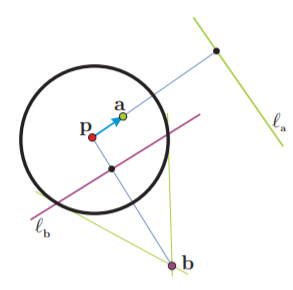
Definición. Consideremos un punto $\mathbf{a}$ en el plano, diferente del centro $(\mathbf{a} \neq \mathbf{p})$, diremos que $\ell_{a}$ es la recta polar de $\mathbf{a}$ respecto al círculo $\mathcal{C}$ y definiremos $\ell_{a}$ como
De la definición, se sigue que cuando $\boldsymbol{a} \in \mathcal{C}$ su polar $\ell_{\mathbf{a}}$ es su tangente. Como te puedes dar cuenta, las líneas polares son algo así como una generalización de las líneas tangentes; estamos repitiendo los desarrollos algebraicos que utilizamos en la primera sección sin restringirnos a los puntos que están sobre la circunferencia. Nuestra definición de líneas polares tiene varias consecuencias interesantes; una de ellas es que si el punto $\mathbf{a}$ está en el interior del círculo, entonces $\ell_{a}$ no lo intersecta (está totalmente contenida en el exterior), y que si está en el exterior (el punto $\mathbf{b}$ en la siguiente figura), entonces lo corta, y además lo corta en los dos puntos de $\mathcal{C}$ a los cuales se pueden trazar tangentes.
Existen tres posibles casos, que el punto polar esté dentro de la circunferencia, fuera o que esté sobre ella. El último caso se exploró a detalle en la primera parte de esta entrada.
Vamos a demostrar los enunciados que presentamos en el párrafo anterior. Para esto, expresemos las ecuación $\ell_{a}$ en su forma normal; desarrollando [numero de ecuación de la definición] se obtiene:
Esto indica que $\ell_{a}$ es perpendicular al vector que va de $\mathbf{p}$ a $\mathbf{a}$. Ahora veamos cuál es su punto de intersección con la recta que pasa por $\mathbf{p}$ y $\mathbf{a}$. Parametricemos esta última recta con $\mathbf{p}$ de cero y $\mathbf{a}$ de uno (es decir como $\mathbf{p}+\mathbf{t}(\mathbf{a}-\mathbf{p})$) y podemos despejar $t$ al sustituir en la variable $\mathbf{x}$ de la ecuación anterior (o bien, esto se ve más directo al sustituir en la [numero de ecuación de la definición] ), para obtener
y tenemos lo primero que queríamos probar: si $\mathrm{d}(\mathbf{p}, \boldsymbol{a})<\mathrm{r}$ entonces $\mathrm{d}\left(\mathbf{p}, \ell_{\mathbf{a}}\right)>\mathrm{r}$; y al revés, si $\mathrm{d}(\mathbf{p}, \mathbf{a})>\mathrm{r}$ entonces $\mathrm{d}\left(\mathbf{p}, \ell_{\mathbf{a}}\right)<\mathrm{r}$. Dicho de otra manera, si el punto $\mathbf{a}$ está muy cerca de $\mathbf{p}$, su polar está muy lejos, y al revés, sus distancias al centro $\mathbf{p}$ se comportan como inversos «alrededor de r».
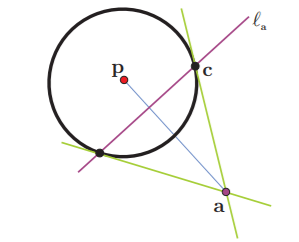
Para demostrar la segunda de nuestras afirmaciones, supongamos ahora que $\mathrm{d}(\mathbf{p}, \mathbf{a})>\mathrm{r}$, y sea $\mathbf{c}$ un punto en $\ell_{a} \cap \mathcal{C}$ (que sabemos que existe pues $\ell_{a}$ pasa por el interior de $\mathcal{C}$). Puesto que $\mathbf{c} \in \ell_{\mathrm{a}}$, se cumple la ecuación
Pero entonces $\mathbf{a}$ cumple la ecuación de $\ell_{c}$ que es la tangente a $\mathcal{C}$ en $\mathbf{c}$; es decir, la línea de $\mathbf{a}$ a $\mathbf{c}$ es tangente al círculo. Este argumento, visto de una forma todavía más general nos dice que para cualesquiera dos puntos $\mathbf{a}$ y $\mathbf{b}$ (distintos de $\mathbf{p}$) se tiene que
\begin{equation} a \in \ell_{b} \Leftrightarrow \mathbf{b} \in \ell_{a} \end{equation}
Y los puntos del círculo son los únicos para los cuales se cumple que $\mathbf{a} \in \ell_{a}$. Puedes apoyarte en la siguiente figura para seguir el desarrollo anterior.
Date cuenta cómo a lo largo de este procedimiento sin querer aprendimos a calcular los puntos de tangencia a un círculo desde un punto exterior $\mathbf{a}$. A saber, de la ecuación lineal de su polar, $\ell_{a}$, se despeja alguna de las dos variables y se sustituye en la ecuación del círculo. Esto nos da una ecuación de segundo grado en la otra variable que se puede resolver, y nos da dos raíces. Sustituyéndolas de nuevo en la ecuación de la polar se obtiene el otro par de coordenadas.
Para dejar bien claro este procedimiento, hagamos un ejercicio sobre cómo encontrar los puntos de tangencia desde un punto fuera de la circunferencia.
Ejemplo. Supongamos que tenemos un círculo con centro en $(3,-1)$ y radio $2$, encontraremos los puntos de tangencia desde el punto $\mathbf{a}=(1,3)$.
Podemos iniciar de dos maneras diferentes: la primera es utilizando lo que aprendimos en la entrada anterior, escribiendo directamente la ecuación vectorial de la circunferencia. Si hacemos esto, encontraremos que la circunferencia tiene la siguiente expresión vectorial
Otra alternativa sería primero escribir la ecuación cartesiana y luego desarrollarla para pasarla a su forma vectorial; de ambas maneras, lo importante es escribir a la circunferencia en su forma vectorial. Ahora, para conocer los puntos de tangencia desde $\mathbf{a}=(1,3)$ sustituimos en la forma alternativa de la ecuación de la tangente:
que nos da los valores $y_{0}=-1$ y $y_{1}=\frac{3}{5}$. Y estos, al sustituir de nuevo la ecuación de la polar nos dan los puntos de tangencia de $\mathbf{a}$; que son $(1,-1)$ y $\frac{1}{5}(21,3)$. Puedes verificar que satisfacen la ecuación del círculo sustituyendo en la ecuación lineal de la polar, y que efectivamente sus tangentes pasan por $\mathbf{a}$.
Para finalizar esta entrada te invito a que experimentes un momento con el recuadro interactivo. Nota cómo las líneas polares se convierten en las líneas tangentes cuando haces que el punto $\mathbf{a}$ esté sobre la circunferencia.
Más adelante…
En esta entrada finalizamos nuestra discusión de las circunferencias; la primera de las secciones cónicas que abordamos en nuestro curso. En la siguiente entrada podrás ver una serie de ejercicios para familiarizarte con la manipulación algébrica o vectorial de los conceptos que hemos introducido hasta ahora. En las siguientes entradas continuaremos nuestro estudio de las secciones cónicas hablando de parábolas, hipérbolas y elipses. Veremos cómo no es tan fácil dar una ecuación vectorial para el resto de las secciones cónicas; esto lo entenderemos tan pronto como empecemos a hablar de parábolas.
Tarea moral
A continuación hay algunos ejercicios para que practiques los conceptos vistos en esta entrada. Te será de mucha utilidad intentarlos para entender más la teoría vista.
Encuentra los puntos de tangencia: al círculo $x^{2}-2 x+y^{2}-4 y=-3$ desde el punto $(-1,2)$. Sugerencia: puedes consultar el segundo ejercicio realizado en esta entrada.
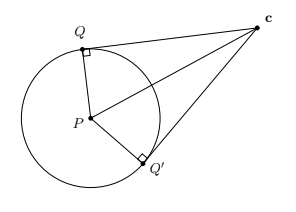
Demuestra que si $\mathbf{c}$ es un punto exterior (al círculo $\mathcal{C}$ con centro $P$ ) entonces su recta a $P$ biseca sus dos tangentes a $\mathcal{C}$. Y además que las distancias a sus pies en $\mathcal{C}$ (es decir, a los puntos de tangencia) son iguales. Sugerencia: Puedes utilizar la siguiente figura para tu demostración y pensar en el teorema de Pitágoras y en el criterio de congruencia LLL.
En nuestra vida cotidiana podemos encontrar muchos ejemplos de circunferencias. Desde la forma de una rueda, hasta el contorno de una taza y por supuesto en muchos fenómenos físicos como la trayectoria de una partícula en un campo magnético o el movimiento de un satélite alrededor de un planeta. Esta familiaridad que tenemos con las circunferencias, hacen que ésta sea la sección cónica más fácil de reconocer, pues incluso sin estudios formales en geometría estamos familiarizados con sus propiedades.
En esta entrada del blog propondremos una definición formal para la circunferencia; partiendo de la definición de la circunferencia como lugar geométrico, llegaremos a la ecuación cartesiana con la que probablemente ya estés familiarizado. Abordaremos la ecuación vectorial del círculo y vamos a ver qué ventajas tiene sobre la ecuación cartesiana.
Ecuación cartesiana de circunferencia
Probablemente en algún curso previo de álgebra o de geometría te hayas encontrado con el círculo unitario $\mathbb{S}^{1}$, definido por la ecuación
\begin{equation} x^{2}+y^{2}=1 \end{equation}
Para generalizar las nociones que tenemos del círculo unitario a una circunferencia arbitraria, consideremos ahora a cualquier otro círculo $\mathcal{C}$. Tiene un centro $\mathbf{p}=(h, k)$, un radio $r>0$ y es el lugar geométrico de los puntos cuya distancia a $\mathbf{p}$ es $r$. Es decir, $\mathcal{C}=\left\lbrace\mathbf{x} \in \mathbb{R}^{2} \mid d(\mathbf{x}, \mathbf{p})=r\right\rbrace$; o bien, $\mathcal{C}$ está definido por la ecuación
La información geométrica clave de una circunferencia son su centro y su radio. Ambos se pueden pensar en términos de sus coordenadas cartesianas, o bien como vectores.
Puesto que ambos lados de esta ecuación son positivos, es equivalente a la igualdad de sus cuadrados que en coordenadas cartesianas toma la forma
Así, todos los círculos de $\mathbb{R}^{2}$ están determinados por una ecuación cuadrática en las variables $x$ y $y$. Cuando la ecuación tiene la forma anterior, podemos leer inmediatamente toda la información geométrica (el centro y el radio). Lamentable, la mayoría de las veces que nos encontremos con ecuaciones de circunferencias las encontraremos «disfrazadas» como
\begin{equation} x^{2}+y^{2}-2 h x-2 k y=\left(r^{2}-h^{2}-k^{2}\right) \end{equation}
Es fácil ver que esta forma de escribir la circunferencia se obtiene al desarrollar la primera expresión. Veamos un ejemplo de cómo pasar una ecuación de circunferencia a su forma reducida.
Tenemos que determinar si la ecuación anterior define un círculo, y en caso de que así sea, qué características tiene. Lo primero que tenemos que hacer es completar los cuadrados, sumando en ambos lados las constantes que faltan
Claramente si desarrollamos esta última ecuación obtenemos la original. Así, podemos concluir que la ecuación define al círculo con centro en $(3,-1)$ y radio $2$.
Para terminar esta sección, puedes utilizar la ventana interactiva de GeoGebra para familiarizarte con la ecuación cartesiana de la circunferencia. Varía el radio y el centro del círculo y observa cómo cambia la ecuación. Intenta hacer una circunferencia por cada uno de los cuadrantes del plano poniendo mucha atención cómo cambian los signos dentro de los sumandos. Prueba casos límite ¿qué pasa si el radio el cero? ¿Un punto es una circunferencia?
Ecuación vectorial de circunferencia
Si nuestra ecuación cartesiana de circunferencia ya nos permitía «leer» toda la información geométrica de un círculo completando cuadrados, te puede parecer superfluo proponer una definición vectorial de la circunferencia. La motivación que tenemos para hacer esto es que una definición vectorial, al no hacer referencia a las coordenadas, tiene sentido en cualquier dimensión. Esto quiere decir que a diferencia de la ecuación cartesiana que sólo nos sirve para $\mathbb{R}^{2}$, una ecuación vectorial nos permitirá definir esferas en $\mathbb{R}^{3}$ y en dimensiones mayores.
Sin más preámbulo, diremos que el círculo $C$ con centro $\mathbf{p}$ y radio $r$ está definido por la ecuación
Si tienes dificultades entendiendo por qué se utilizó el producto punto, te ayudará recordar que en la primera unidad de nuestro curso definimos la distancia euclidiana entre dos vectores (o norma) como el producto punto (o producto interior) del vector consigo mismo. En nuestro caso, sólo partimos de la definición de circunferencia como el lugar geométrico de todos los puntos que equidistan de un mismo punto y aplicamos la definición vectorial de distancia.
La ecuación, que llamaremos ecuación vectorial del círculo, se puede también reescribir como
Veamos un ejemplo de la ecuación vectorial del círculo para familiarizarnos con ella.
Ejemplo. Considere la circunferencia con centro en $(3,1)$ y radio $2$. Encuentre su ecuación vectorial y su ecuación cartesiana. Demuestre que ambas ecuaciones son equivalentes.
Lo primero que tenemos que hacer es obtener la ecuación vectorial de la circunferencia. Utilizando la definición que acabamos de escribir en esta entrada, podemos ver que la ecuación que buscamos es
Estas dos expresiones, son las ecuaciones que buscamos. Sólo nos falta demostrar su equivalencia. Recordando las propiedades del producto punto que introducimos en la unidad anterior
¡Listo! Ya nos convencimos que la ecuación cartesiana y la ecuación vectorial son equivalentes cuando estamos trabajando en $\mathbb{R}^{2}$. Por el momento, conservemos la idea de que la ecuación vectorial es un poco más general y de ella se puede extraer mucha información geométrica interesante.
Para finalizar esta sección, utiliza el siguiente recuadro interactivo para familiarizarte con la ecuación vectorial del círculo. Manipula el centro y el radio para ver cómo se reescribe la ecuación y entiende muy bien cómo el producto punto es la operación clave de la definición. ¿Puedes encontrar los parámetros adecuados para hacer que en ambos interactivos tengamos círculos equivalentes con diferentes formas de escribir la ecuación?
Más adelante…
En esta entrada discutimos detalladamente las definiciones cartesianas y vectorial de la circunferencia, propusimos algunos ejemplos para familiarizarnos con estas expresiones y aprendimos a «leer» la información geométrica que guardan. Sin embargo, no hemos acabado nuestro estudio de las circunferencias. En las siguientes entradas abordaremos el tema de las rectas tangentes y polares y resolveremos algunos ejercicios relacionados a estas secciones cónicas.
Tarea moral
A continuación hay algunos ejercicios para que practiques los conceptos vistos en esta entrada. Te será de mucha utilidad intentarlos para entender más la teoría vista.
¿Cuáles de las siguientes ecuaciones son ecuaciones de un círculo? Y en su caso, ¿de cuál?
¿Cuál es el lugar geométrico de los centros de los círculos que pasan por dos puntos (distintos) $a$ y $b$? Sugerencia: considera la definición geométrica de la circunferencia como el conjunto de puntos que equidistan de un centro y ten en cuenta la definición vectorial de la mediatriz.
Sean $p$ y $q$ dos puntos distintos en el plano. ¿Para cuáles números reales $c$, se tiene que la siguiente ecuación define un círculo? En su caso, ¿cuál es el radio y dónde está su centro?
Determinar la ecuación, centro y radio de la circunferencia que pasa por los tres puntos $A(-1,1)$, $B(3,5)$ y $C(5,-3)$. Sugerencia: considera que la ecuación buscada tiene la forma $x^2 + y^2 + Dx+ Ey + F= 0$, luego sustituye la información que te ofrece el problema para llegar a un sistema de ecuaciones y resuelvelo.
Los grandes problemas, como los grandes bocados, se tienen que acabar poco a poco. Acabarse una hamburguesa de un sólo bocado tiene sus complicaciones, pero si vas dándole mordida por mordida ya no parece una tarea imposible. Esta es justo la filosofía que está detrás de dividir en casos.